

A strong anti-disturbance composite control method to overcome the influence of periodic moving parts
A technology of composite control and moving parts, which is applied in the direction of motor vehicles, space navigation equipment, space navigation aircraft, etc., can solve the problem that the system stability is not easy to guarantee, and achieve the effect of good anti-interference effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
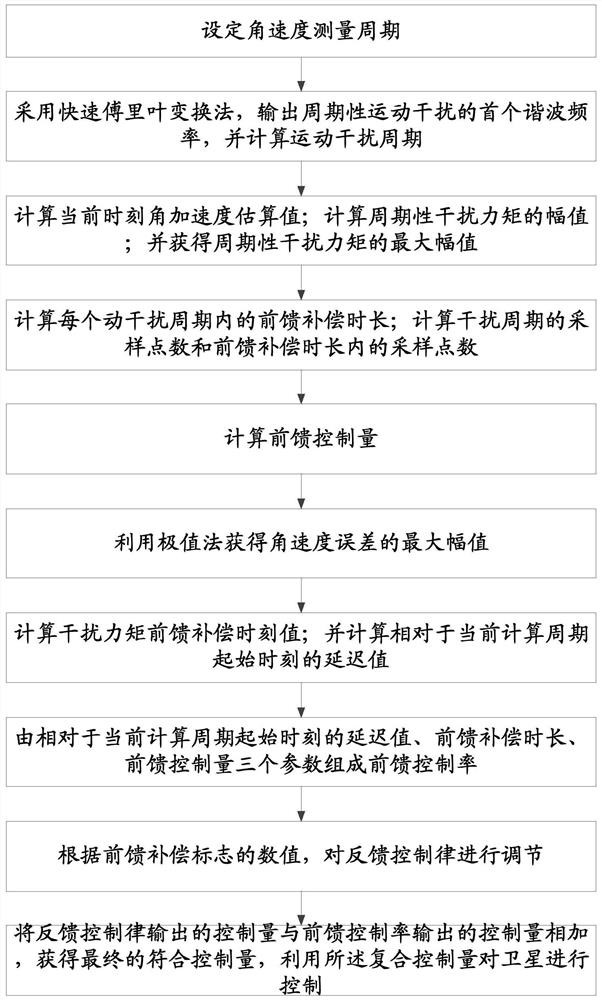
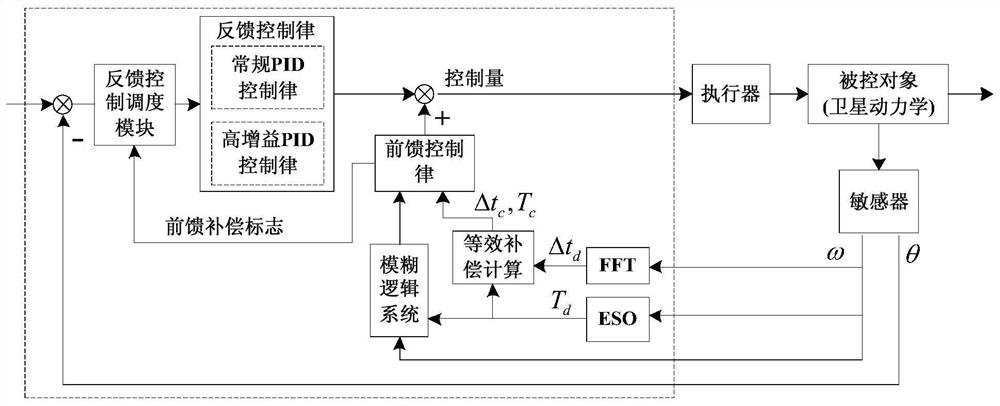
[0110] Taking a satellite with a flywheel as an executive component as an example, the specific implementation of the present invention will be introduced. Take satellite pitch axis control as an example to illustrate. Assuming that the inertia of the satellite pitch axis is 5000kg.m2, the maximum combined moment of the flywheel group on the pitch axis is 0.2Nm. The moving part on the satellite is SADA, which is driven by a stepper motor through a reduction gear, and its motion period Δt d =4.32s, the maximum moment T acting on the star d,max About 0.1Nm, the dynamic process of single-step motion is about 1s. The controller sampling period h=0.1s. The following technical points and calculation formulas are realized by the onboard software and calculated in real time. figure 2 This is a schematic structural diagram of a strong disturbance immunity composite control system provided by an embodiment of the present invention. In this system,
[0111] (1) Using the fast Four...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More