

Bolt retightening robot for power angle steel tower
An angle steel tower and robot technology, which is applied in the directions of manipulators, motor vehicles, metal processing, etc., can solve the problems of long airborne time, endangering the health of workers, and high labor intensity, and achieves reliable force sealing, shape sealing, and high work efficiency. Reliability and stability, the effect of high movement stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
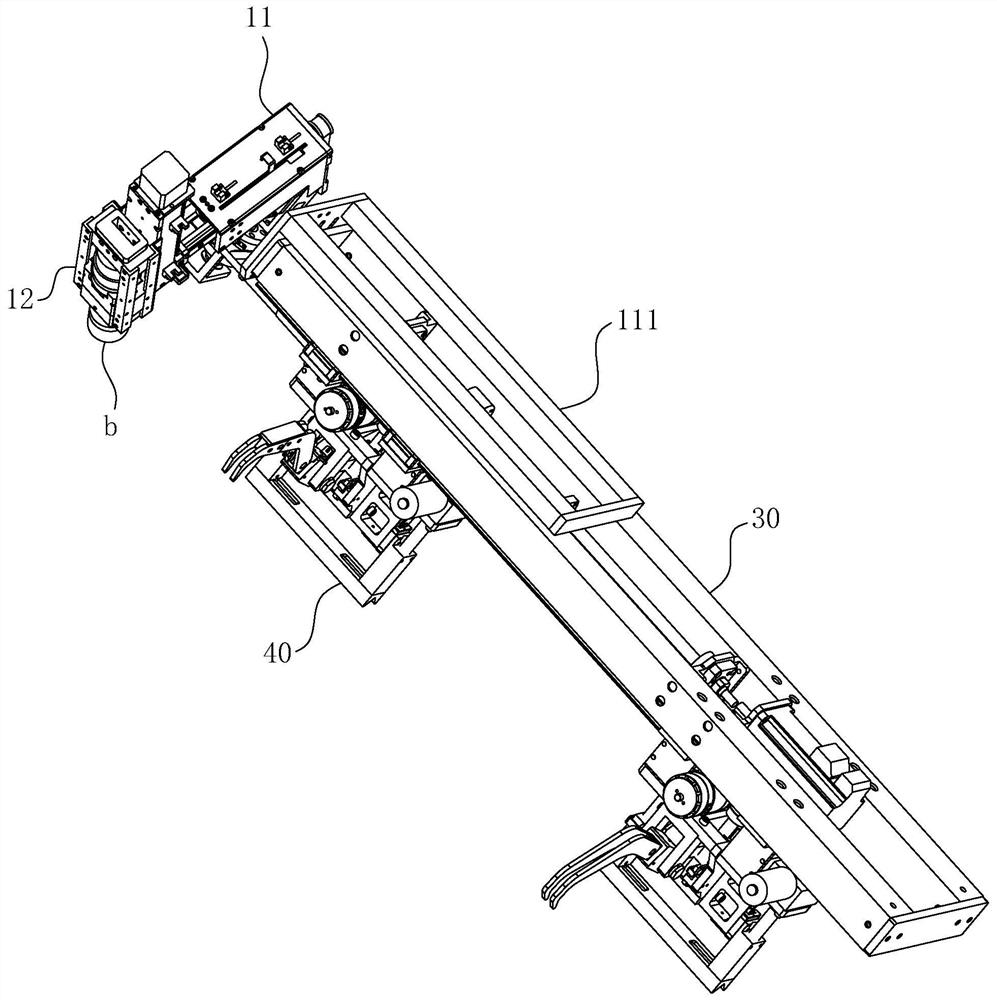
[0076] For the convenience of overall understanding, the structure and working method of the specific embodiment of the whole climbing robot applied in the present invention are described as follows:
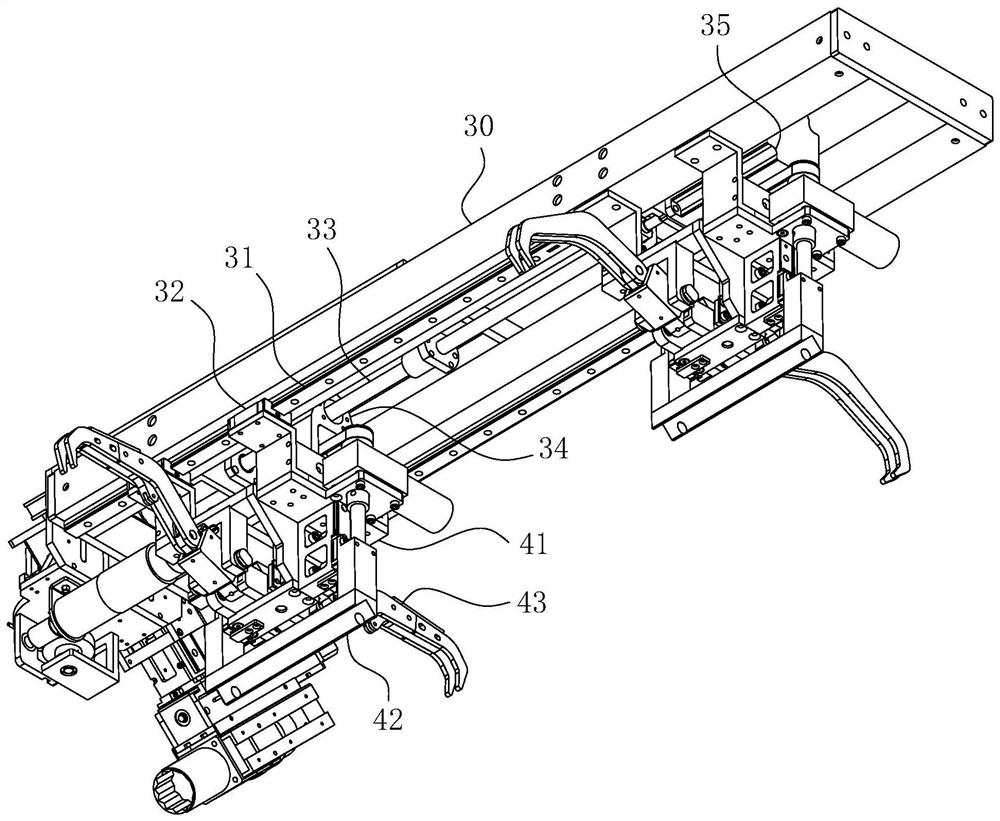
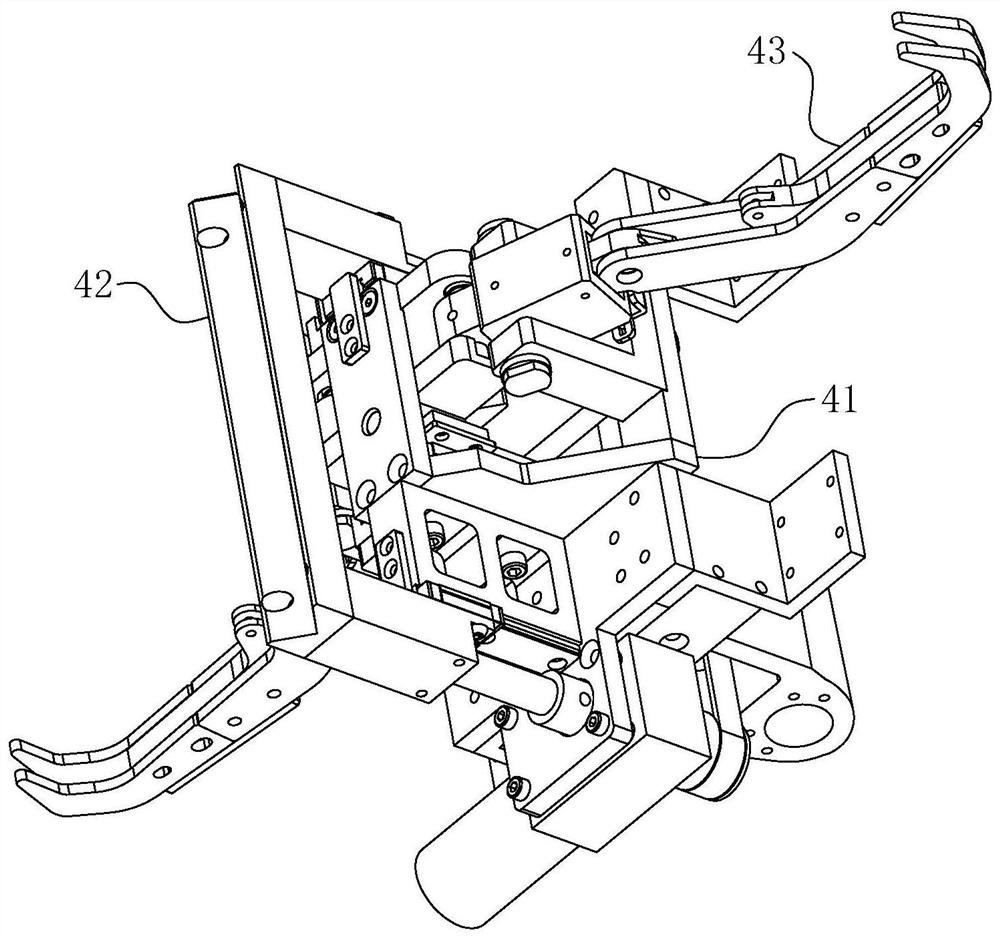
[0077] Climbing robot, here as Figure 1-2 The shown inchworm structure is an example: its specific structure includes a strip-shaped frame-shaped host 30, an angle steel clamping assembly 40 is arranged at the host 30 to realize the climbing function of the main angle steel material, and a working kit is arranged on the host 30 to realize Specifies the service purpose of the function. In the present invention, the working kit is such as Figure 13-20 Bolt retightening device shown. During actual work, the length direction of the main frame 30 should be parallel as Figure 21 The length direction of the angle steel main material a at the power angle steel tower shown. in:
[0078] In a further design, the inchworm structure of the present invention includes a slide track 31...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More