

Camera pose solving method applied to weak texture large rotation scene
A weak texture and scene technology, applied in image data processing, computer components, instruments, etc., can solve problems such as inapplicability of visual methods and short boards of visual methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0048] The present invention will be further described below in conjunction with specific embodiment:
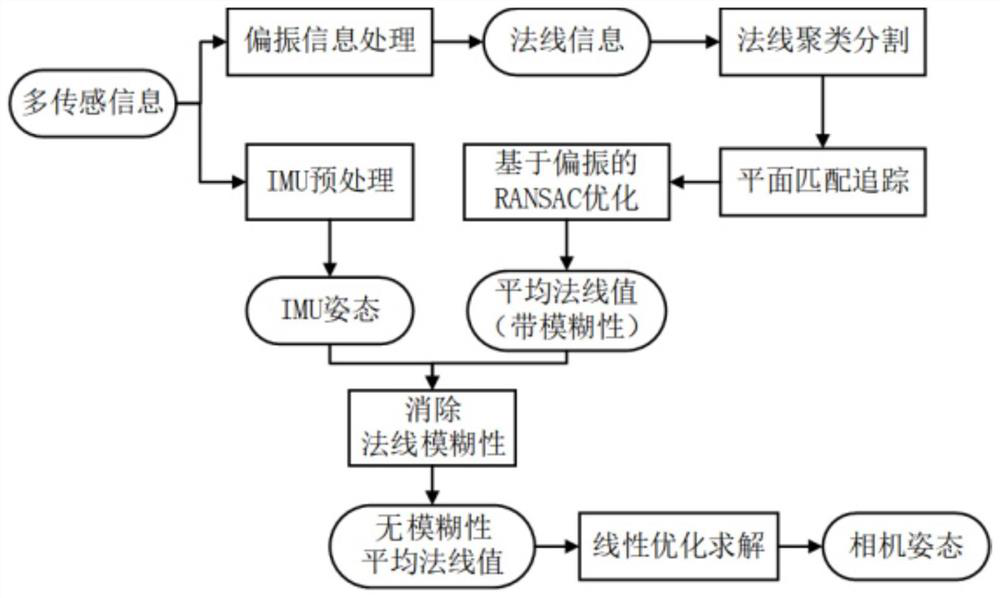
[0049] Such as figure 1 As shown, a method for solving the pose of a camera applied to a scene with weak texture and large rotation described in this embodiment includes the following steps:
[0050] S1. Considering the specular reflection and diffuse reflection models, using the SPF method to restore the normal information with ambiguity from the polarization image;
[0051] This step specifically includes:
[0052] Using the SFP method to calculate the zenith angle and azimuth angle values of two models including specular reflection and diffuse reflection from the polarization information, the specific solution formula is as follows:
[0053]
[0054] In formula (1), ρ represents the degree of polarization, β represents the zenith angle, and n represents the refractive index in the scene. Given the degree of polarization and the refractive index, the unique zenith a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More