High-precision hand-eye calibration method for garbage sorting robot
A hand-eye calibration and robot technology, which is applied in the fields of instruments, sorting, image analysis, etc., can solve the problems of low calibration accuracy and poor material grasping, and achieve the requirements of low accuracy, reduce calibration difficulty and cost, and reduce calibration errors. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The technical solutions of the present invention will be clearly and completely described below through specific embodiments.
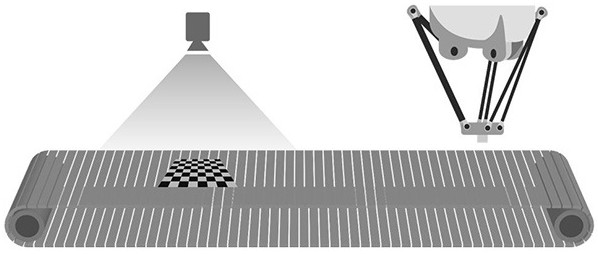
[0060] A high-precision hand-eye calibration method for a garbage sorting robot of the present invention, such as figure 1 As shown, the eye-to-hand system for parallel robots is suitable, and the system is composed of three parts: vision module, robot module, and transmission module; among them, the length of the conveyor belt used by the transmission module is 4m, the width is 0.9mm, and the maximum speed can reach 2m / s; the vision module adopts a 5 million pixel CMOS industrial camera, and its lens focal length is 8mm, the vision module is located at the front end of the robot module, and is fixed at a height of 1m above the conveyor belt; The working range is 900mm and it is fixed above the conveyor belt.
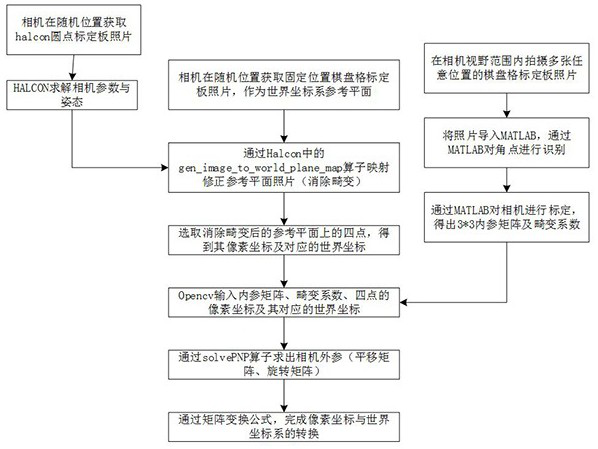
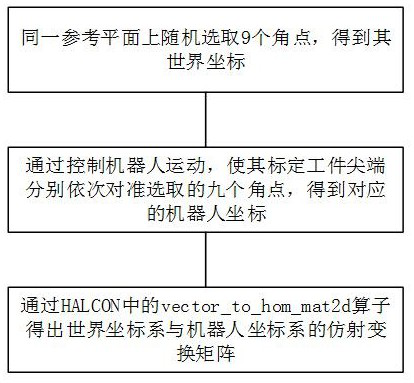
[0061] A high-precision hand-eye calibration method for a garbage sorting robot of the present invention, such as Figure 1~4 shown, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More