Driving system and method for wall-climbing robot without physical brake
A wall-climbing robot and drive system technology, applied in the control system, current controller, rotation direction control, etc., can solve problems such as poor robustness, reduce hardware costs, increase battery life and application upper limit, and improve dynamic response performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
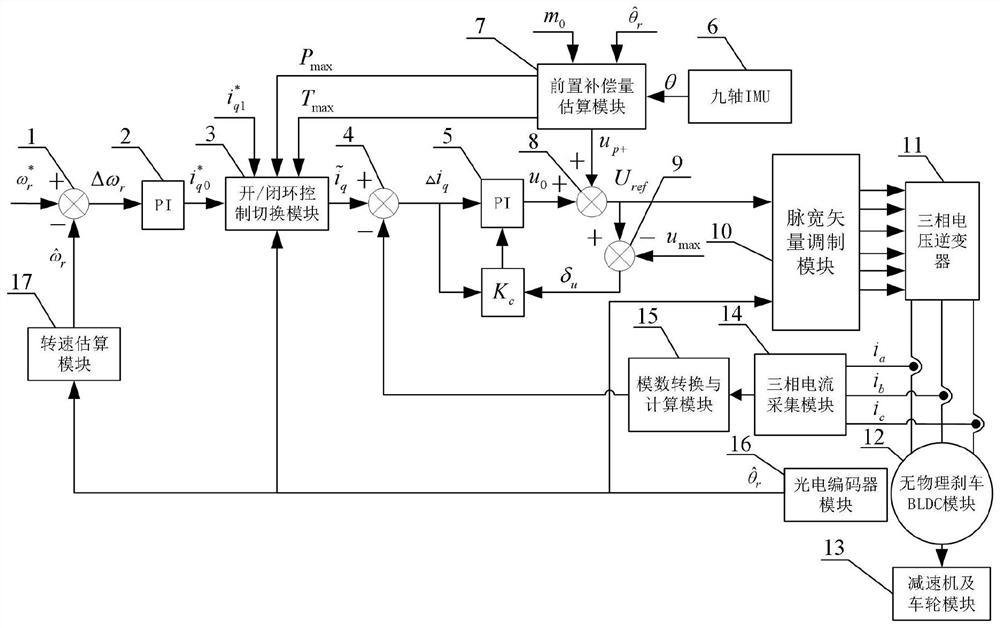
[0080] Embodiment 1, a kind of driving system for wall-climbing robot without physical brake, such as figure 1 As shown, it includes a first subtractor (1), a speed outer loop integrator (2), an open / closed loop control switching module (3), a second subtractor (4), a current inner loop integrator (5), and a nine-axis IMU sensor (6), feedforward compensation estimation module (7), first adder (8), third subtractor (9), pulse width vector modulation module (10), three-phase voltage inverter (11) , no physical brake BLDC module (12), reducer and wheel module (13), three-phase current acquisition module (14), analog-to-digital conversion and calculation module (15), photoelectric encoder module (16) and speed estimation module ( 17);
[0081] The target speed that the main control system will set Input in the first subtractor (1);
[0082] The first subtractor (1) calculates the target speed and actual speed The difference Δω is input into the speed outer loop integrator ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap