Lie group heavy-tail interference noise dynamic aircraft attitude estimation method based on variational iterative Kalman filtering
A Kalman filter and attitude estimation technology, which is applied in the field of attitude estimation of aerospace systems to achieve the effect of improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
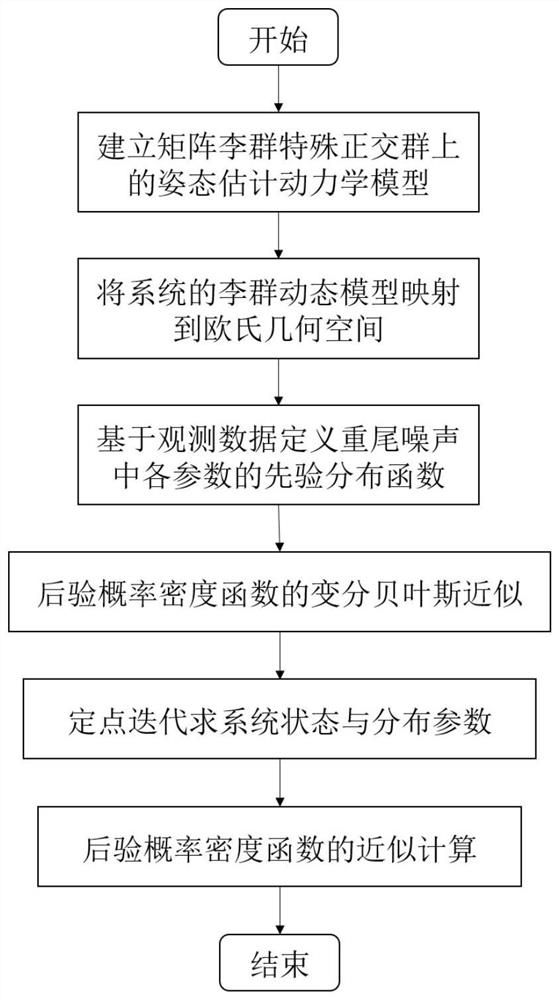
[0150] Adopt a kind of Lie group heavy-tail interference noise dynamic aircraft attitude estimation method based on variational iterative Kalman filtering proposed by the present invention, given system parameter and initial value:
[0151] Σ 0|0 =0.5236 2 I 3×3 ,Σ w =0.01745 2 I 3×3 ,b'=[1,0,0] T ,b”=[0,1,0] T ,Σ v' =0.0873 2 I 3×3 ,Σ v” =0.0873 2 I 3×3 .
[0152] The filtering parameter is set to λ k =k+4,a k =2,b k =6,N=10.
[0153] The real attitude trajectory is 5000 seconds long, and the heavy-tailed process noise is generated together with heavy-tailed outliers:
[0154]
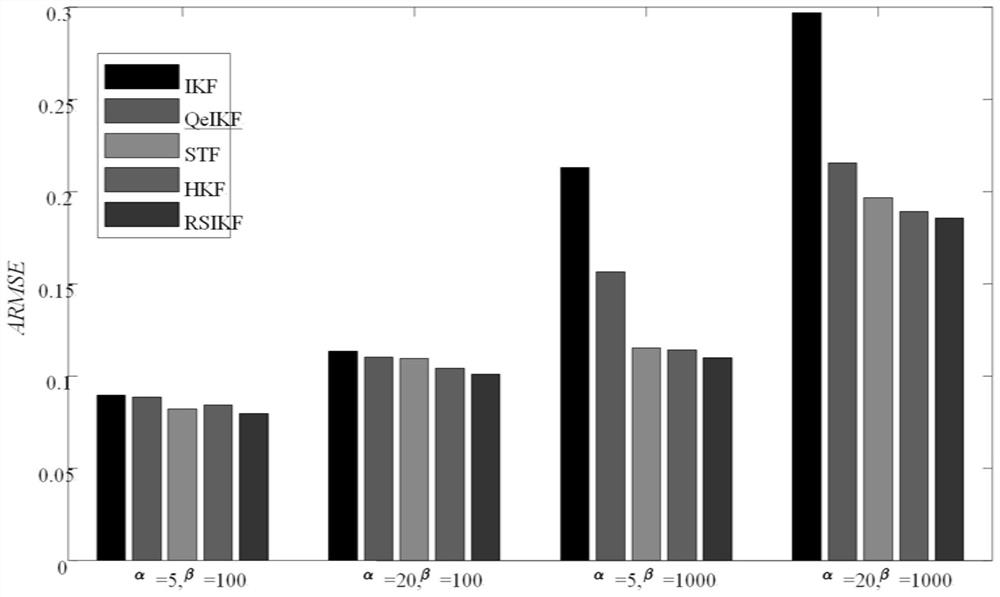
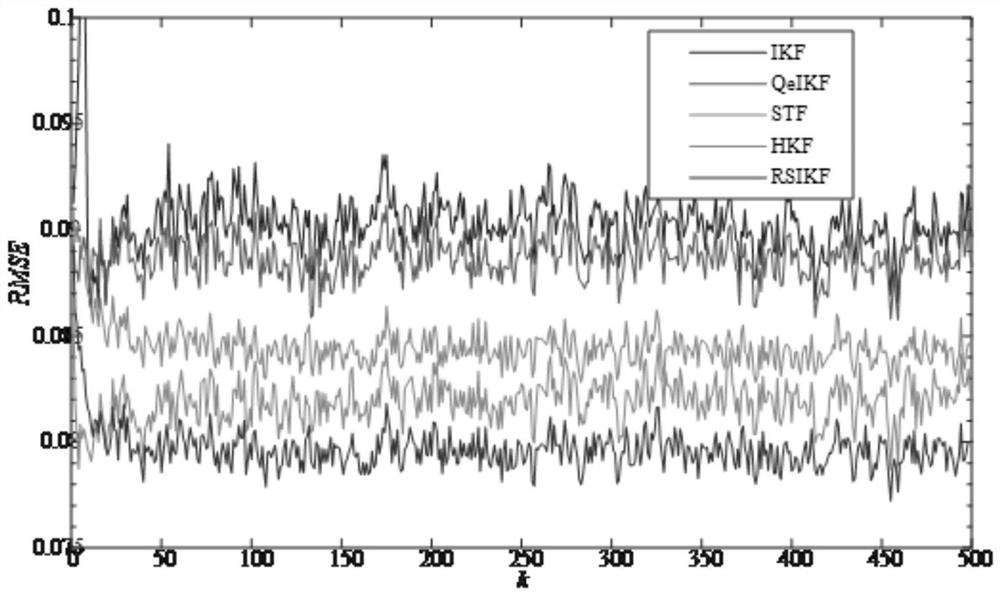
[0155] And to compare the theoretical performance, the root mean square error and average root mean square error after 5000s filtering are calculated using the error variable in the Lie algebra of 5000 random runs:
[0156]
[0157]
[0158] In this example, the two conditions of α=5, β=10 and α=20, β=10 are respectively used to simulate and compare the performance of differ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More