Label mapping method and device, equipment and storage medium
A technology for labeling and labeling areas, which is applied in the directions of instruments, character and pattern recognition, computer components, etc., can solve the problems of low efficiency of mapping and high labor cost, so as to reduce labor costs, reduce errors in mapping, and improve the accuracy of mapping degree of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
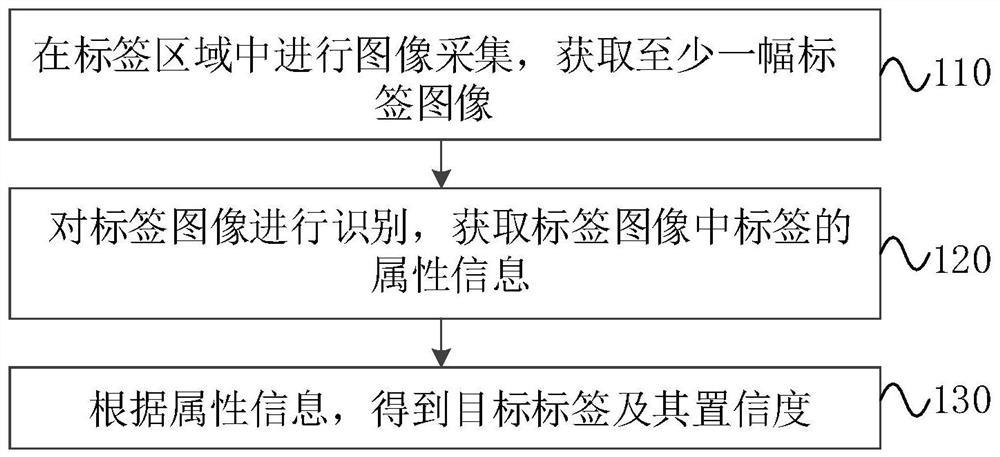
[0040] figure 1 It is a flow chart of a label mapping method in Embodiment 1 of the present invention. The technical solution of this embodiment is applicable to the situation where the label confidence is obtained according to the attribute information of the label contained in the label image. This method can be constructed by label device, which can be implemented by software and / or hardware, and can be integrated in various general-purpose computer equipment. The tag mapping method in this embodiment specifically includes the following steps:
[0041] Step 110, perform image acquisition in the label area, and acquire at least one label image; the label image includes at least one label.
[0042] Among them, the tag is used for wireless positioning of the robot. Specifically, the tag can be a marker containing specific identification information pre-set in the area where the robot is located. The robot can locate by identifying the tag during operation. For example, differ...
Embodiment 2
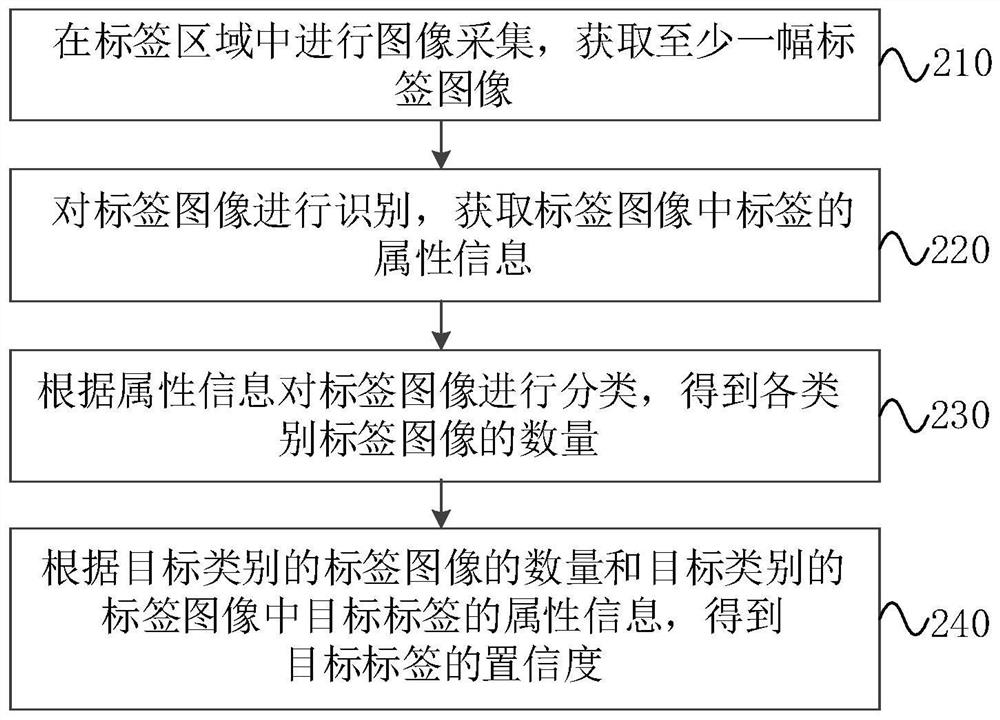
[0056] Figure 2a It is a flow chart of a tag mapping method in Embodiment 2 of the present invention. This embodiment is further refined on the basis of the above embodiments, and provides specific steps for obtaining target tags and their confidence levels according to attribute information. Combine below Figure 2a A label mapping method provided in Embodiment 2 of the present invention is described, including the following steps:
[0057] Step 210, perform image acquisition in the label area, and acquire at least one label image; the label image includes at least one label.
[0058] Step 220, identify the label image, and acquire the attribute information of the label in the label image.
[0059] Step 230: Classify the label images according to the attribute information, and obtain the number of label images of each category.
[0060] In this embodiment, after acquiring the attribute information of the tag in the tag image, in order to avoid the wrong tag recognition ca...
Embodiment 3
[0074] image 3 It is a flow chart of a label mapping method in Embodiment 3 of the present invention. This embodiment is further refined on the basis of the above-mentioned embodiments, and provides a specific method for collecting images in the label area and obtaining at least one label image. step. Combine below image 3 A label mapping method provided in Embodiment 3 of the present invention is described, including the following steps:
[0075] Step 310: Collect images based on a preset image collection frequency, and determine whether the collected images contain tags.
[0076] In this embodiment, the robot uses the image acquisition unit carried on the top to collect images according to the preset image acquisition frequency, and recognizes the image every time a frame of image is collected, and judges whether the image contains a label, or every time a set number of images are collected The images are identified uniformly, and it is judged whether the collected imag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com