

Wheeled robot trajectory tracking optimal control method
A wheeled robot and trajectory tracking technology, applied in the direction of non-electric variable control, control/regulation system, two-dimensional position/channel control, etc., can solve the problem of wheeled robots following a given trajectory, and achieve the effect of reducing the burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0190] In order to verify the effectiveness of the double-closed-loop trajectory tracking control strategy for wheeled robots proposed by the present invention, the numerical simulation results of MATLAB are given as a verification, which shows that the wheeled robot can still be controlled under the condition of external interference and uncertain internal parameters of the system. Drive normally along the virtual trajectory, as follows:
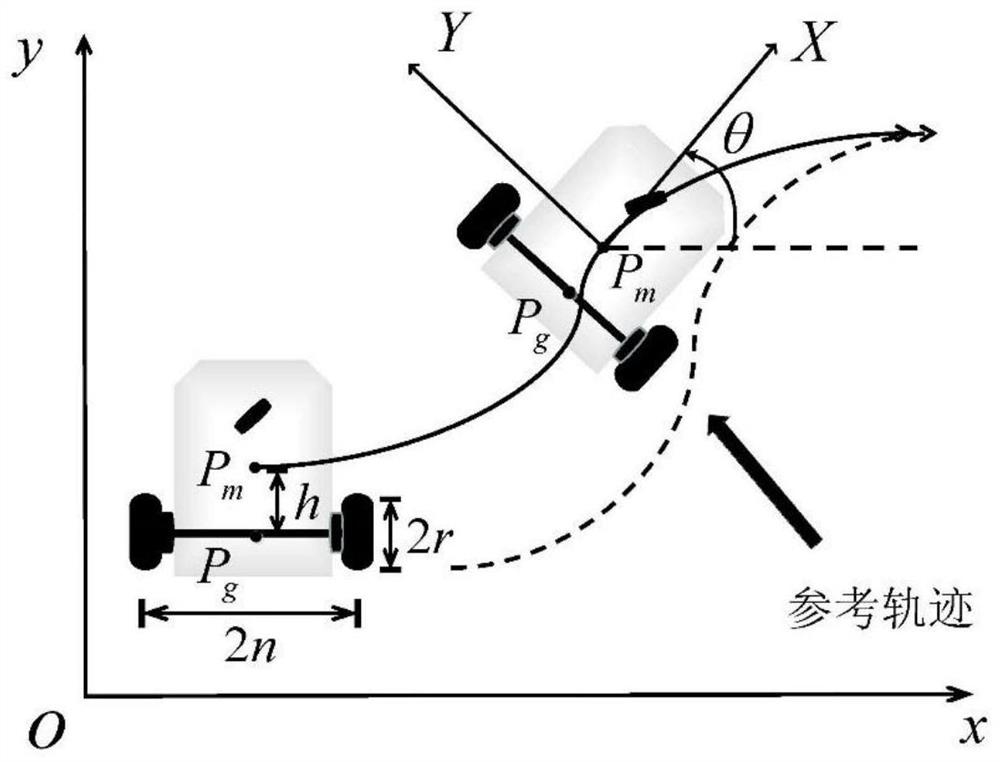
[0191] In this simulation, the virtual reference trajectory in step S1.1 is a circle, the linear velocity of the reference trajectory is 1.4m / s, and the angular velocity is 0.7rad / s.
[0192] Step S2.1, kinematics controller parameter is: k 1 =2.1,k 2 =6.3,k 3 = 3, k 3 =0.5,k 3 =0.7;
[0193] Step S3.1. The mass of the wheeled robot is 10kg, the distance between the differential wheels is 0.2m, the moment of inertia is 5kg.m2, and the applied external disturbance and internal uncertainty are d(t)=[sin 2t cos 2t] T , the system samplin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More