

Automatic sorting system and method for stacked objects in container
An automatic sorting system and object technology, which is applied in sorting and other directions, can solve the problems of difficult to realize the suction of objects at different heights, achieve strong anti-environmental interference ability, and solve time-consuming and labor-intensive effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
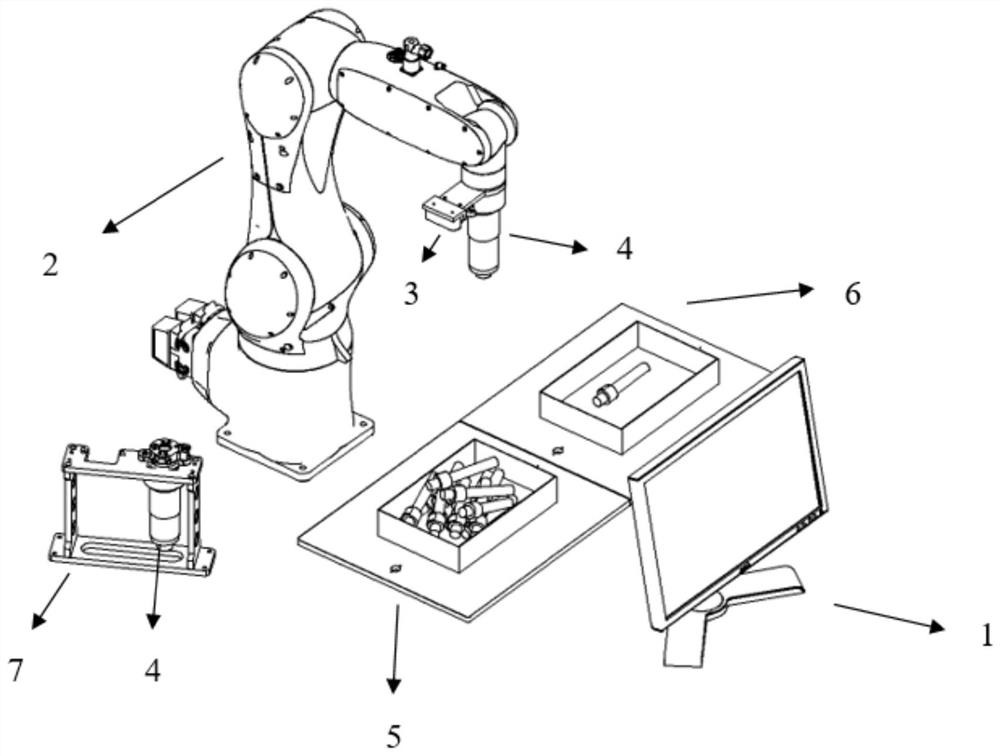
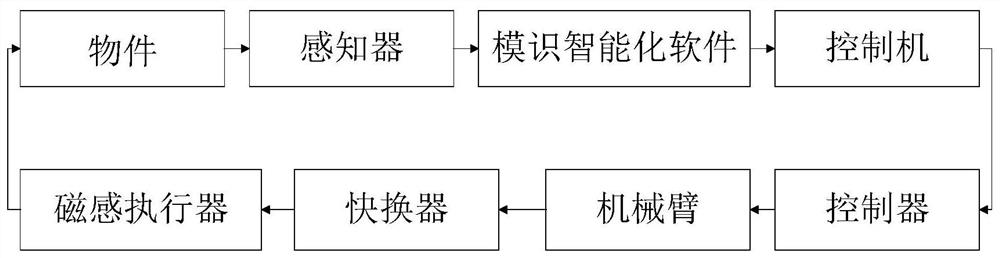
[0045] An automatic sorting system for stacked objects in a container, comprising:
[0046] An image acquisition module, configured to acquire image information of objects piled up in the container;
[0047]The control unit includes an image information processing module and a positioning module. The image information processing module interacts with the image acquisition module to process the acquired image information to obtain training samples, and then perform instance segmentation on the training samples to obtain the maximum The upper object image and the bounding box of the image; the positioning module interacts with the image information processing module, and based on the uppermost object image of the stacked objects in the container, after calculation, the pixel coordinates of the suction point of the object to be sucked and the position of the object to be sucked when being sucked are obtained. The rotation angle and the distance relationship between the object to ...
Embodiment 2
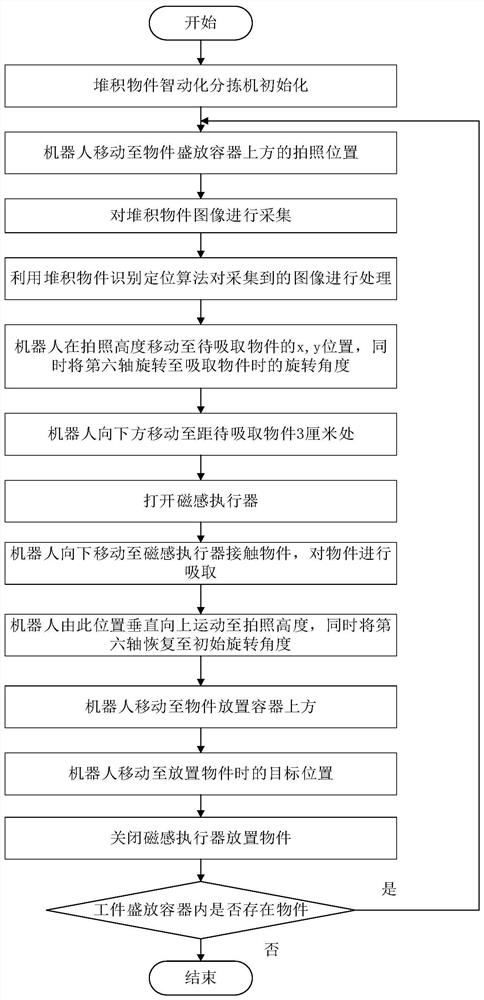
[0051] A method for automatic sorting of accumulated objects in a container, comprising the following steps:
[0052] Step 1) collecting image information of objects piled up in the container, processing the obtained image information to obtain training samples, performing instance segmentation on the training samples, and obtaining the top object image of the piled objects and the bounding box of the image;
[0053] Step 2) Based on the topmost object image of the stacked objects in the container, the pixel coordinates of the suction point of the object to be sucked are obtained after calculation;
[0054] Step 3) Based on the topmost object image of the stacked objects in the container, calculate the rotation angle of the object to be sucked in the stacked objects when sucking;
[0055] Step 4) Obtain the distance relationship between the object to be picked up and the target position based on the topmost object image of the stacked objects in the container, and convert the ...
Embodiment 3
[0058] A method for automatic sorting of accumulated objects in a container, comprising the following steps:
[0059] Step 1) collecting image information of objects piled up in the container, processing the obtained image information to obtain training samples, performing instance segmentation on the training samples, and obtaining the top object image of the piled objects and the bounding box of the image;
[0060] The training samples are labeled well-preserved object pictures;
[0061] The instance segmentation process is:
[0062] Build an instance segmentation network based on training samples;
[0063] Send the newly collected image of the piled-up object in the container to the instance segmentation network to obtain the segmented uppermost object image and the bounding box of the image.
[0064] Step 2) Based on the topmost object image of the stacked objects in the container, the pixel coordinates of the suction point of the object to be sucked are obtained after c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More