

A fully automatic magnetic compensation method for atomic spin gyroscope based on pid algorithm
A kind of atomic spin and gyroscope technology, applied in instruments, electric controllers, controllers with specific characteristics, etc., can solve the problems of low accuracy, complicated operation, long compensation time, etc., to improve the compensation accuracy and collect data accurately , the effect of volume reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0046] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
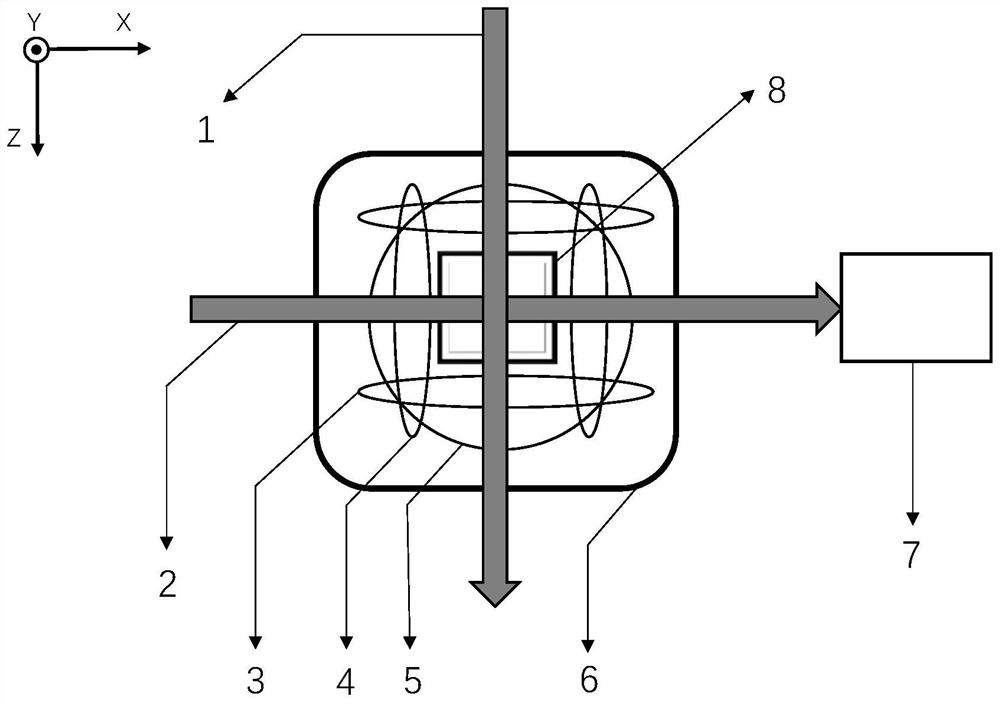
[0047] figure 1 It is a schematic diagram of the system framework of the present invention, and the Z axis is defined as the pumping light direction of the gyroscope, the X axis is the detection light direction orthogonal to it, and the Y axis is the perpendicular direction to the detection light and the pumping light. Among them, 1 represents the pumping laser in the Z-axis direction, 2 represents the detection laser in the X-axis d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More