

Intelligent group formation movement control method based on fuzzy logic
A technology of fuzzy logic and control method, applied in the direction of non-electric variable control, two-dimensional position/channel control, control/regulation system, etc., can solve problems such as control failure, increased energy consumption, and imperfect optimization measures, and achieve reduction Disturbance fluctuations, speed tends to be stable, and the effect of reducing invalid motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
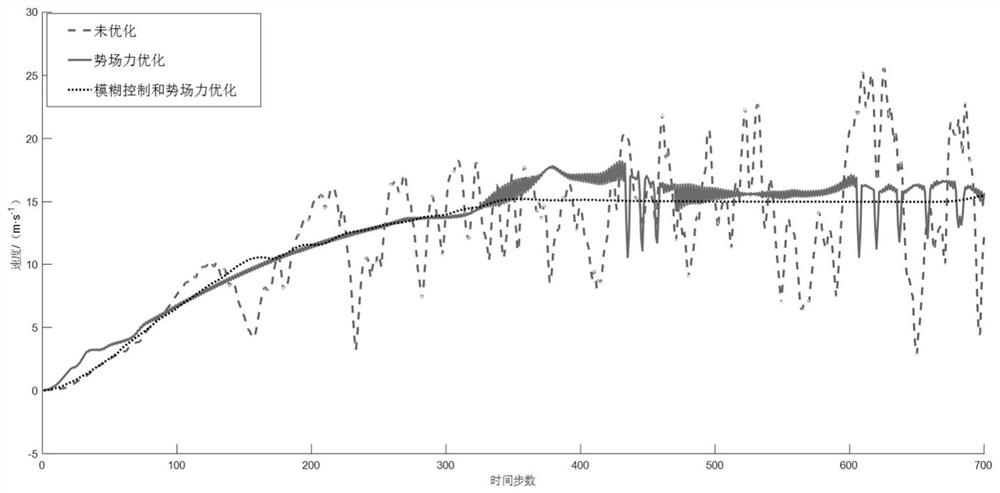
[0042] The multi-agent system is composed of a series of interacting agents. The agents in the region communicate, cooperate and compete with each other to complete a large number of complex tasks with mutual cooperation that cannot be completed by a single agent. Task. In the military, agricultural, and civilian fields, multiple agents cooperate with each other. On the one hand, they can complete tasks of increasing complexity. Higher, better stability and robustness, thereby reducing the performance requirements for a single robot. There are also more diverse approaches to problem solving. At present, the existing agent formation movement control technology mainly has the following problems: 1. With the increase of the number of individuals in the group, the force of each agent fluctuates greatly, and the movement efficiency is not high due to the problem of group motion oscillation. 2. During the movement of the formation, due to the change of the potential field force, t...
Embodiment 2
[0061] The mobile control method of intelligent group formation based on fuzzy logic is the same as example 1, the formation of the described construction intelligent group of step 2, formation of the present invention includes following different formations:
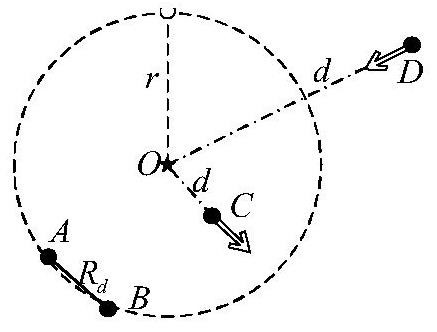
[0062] 2.1 Circular formation: see Figure 2(a), the reference point O is the center of the circle, the formation parameter r is the radius of the circle, r is related to the number of agents n and the expected distance R between agents d The relationship is: Indicates the defined value; the size of the circular formation force is d is the distance from the agent to the reference point O. When d<r, the direction is from the reference point to the agent. When d≥r, the direction is from the agent to the reference point O.
[0063] In the straight formation, triangle formation and rhombus formation, the reference point O is located in the center of the formation, and the connection between the agent A participating in ...
Embodiment 3
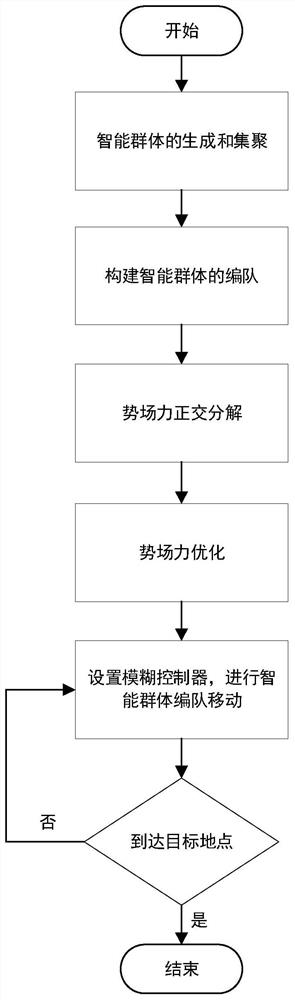
[0071] The intelligent group formation movement control method based on fuzzy logic is the same as example 1-2, the potential field force optimization described in step 4, the present invention includes efficiency optimization and stability optimization to the optimization of potential field force, including the following steps:
[0072] 4.1 Efficiency optimization: The efficiency optimization of the potential field force in the present invention is also called the dissipation force optimization of the potential field force, and each agent is subject to the gravitational force F of the reference point in the area a and formation force F f The role of and the repulsive force F between agents r , the resultant force F on the current agent is the potential field force, F=F a +F r +F f , assuming that the current movement direction of the agent is v, the resulting force is F, and the angle between v and F is θ, after decomposing the resultant force through the potential field f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More