
Eureka
For R&D, Eureka makes reading and utilizing patents & technical documents easy.
Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Quadruped robot for acquiring spatial three-dimensional data
A quadruped robot and three-dimensional data technology, applied in the field of robotics, can solve the problems of decreased precision, waste of kinetic energy, and decreased stability, and achieve the effect of fast travel and improved grip
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
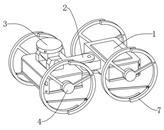
[0032] Such as figure 1 As shown, a quadruped robot for acquiring spatial three-dimensional data provided in this embodiment includes a body 1, the body 1 is divided into two parts, the front and the rear, and the middle part is hinged by a steering hinge 2 to rotate at a horizontal plane connection angle. The side fuselage 1 is provided with a data collection mechanism 3, and the data collection mechanism 3 is hinged with the fuselage 1 to perform angular rotation in a horizontal and vertical plane. It is characterized in that the four corners of the fuselage 1 are distributed with A kinematic mechanism 4 whose connection angle is switched between a wheeled state and a bionic footed state.
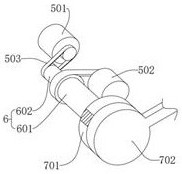
[0033] Further, such as figure 2 , image 3 As shown, the motion mechanism 4 includes a driving motor, a rotating shaft group 6 and a caster wheel 7. The four-corner rotation of the fuselage 1 is provided with a rotating shaft group 6. The rotating shaft group 6 includes a first rotati...
Embodiment 2
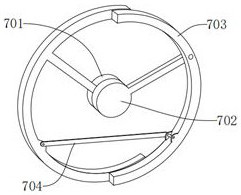
[0049] The difference between this embodiment and embodiment 1 is: as Figure 6 As shown, the first arc-shaped member 701 and the second arc-shaped member 703 are incomplete disc-shaped structures, and the disc-shaped structures are provided with arc grooves concentric with the outer edge of the disc or through holes arranged in an array. The rod 702 and the second connecting rod 704 are hinged in the grooves or through holes of the first arc 701 and the second arc 703 through screw assemblies;
[0050] Compared with the ring structure, the structural strength of the first arc-shaped member 701 and the second arc-shaped member 703 is improved through the arrangement of the disc structure of the first arc-shaped member 701 and the second arc-shaped member 703. The grooves or through holes on the surface can adjust the connection positions of the first connecting rod 702, the second connecting rod 704 and the first arc-shaped member 701 and the second arc-shaped member 703 in re...
Embodiment 3
[0052] The difference between this embodiment and embodiment 1 is: as Figure 7 As shown, the end of the second arc-shaped member 703 away from the hinge point with the first connecting rod 702 is fixed with an arc-shaped structure bent toward the center of the circle through a screw assembly;
[0053] Through the setting of the curved arc-shaped structure at the tail end of the second arc-shaped part 703, when the caster 7 is in the bionic foot form, the angle between the second arc-shaped part 703 and the vertical direction is small, that is, the contact area with the ground is small, which can improve The contact area between the second arc-shaped part 703 and the ground reduces the pressure at the contact point, that is, when the ground is wet and soft, the contact area between the caster 7 and the ground can be improved by installing an arc structure, preventing the caster 7 from sinking, reducing the The difficulty of robot walking increases the pass rate.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com