

Robot joint high-precision control system and method based on full-state feedback
A technology of robot joints and control systems, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve problems such as difficulty in ensuring the integrity and accuracy of mathematical models, difficulty in ensuring the effect of disturbance compensation, complex nonlinear links, etc., to achieve convenience Efficient disturbance compensation, improved position tracking accuracy and anti-interference ability, and improved observation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0048] In order to further understand the invention content, characteristics and effects of the present invention, the following embodiments are enumerated hereby, and detailed descriptions are as follows in conjunction with the accompanying drawings:
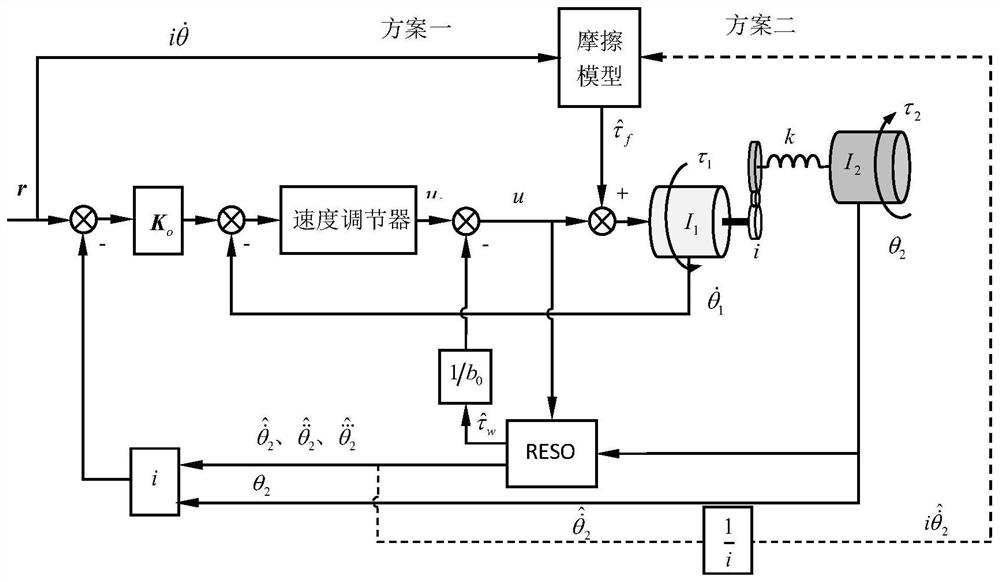
[0049] See figure 1 , a high-precision control system for robot joints based on full state feedback, the control system includes a state observer, a robot joint friction model, a speed regulator, a first proportional regulator, a second proportional regulator, first to third Adder, in-phase adder; state observer, which is constructed based on the equivalent dynamic model of the robot joint, which inputs the detected joint operating position data and the control signal without friction compensation, and outputs the transmission system output The estimated value of the side variable; it includes a first output terminal and a second output terminal, the first output terminal outputs the estimated value of the speed-related variabl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More