

Dynamic picture dynamic display method for position of mechanical arm and control terminal
A dynamic display and robotic arm technology, applied in image analysis, image enhancement, image data processing, etc., can solve the problems of hidden safety hazards on the human body surface, lack of dynamic display signals of dynamic images, and no display of feedback information at the end of the robotic arm. The effect of avoiding safety hazards
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
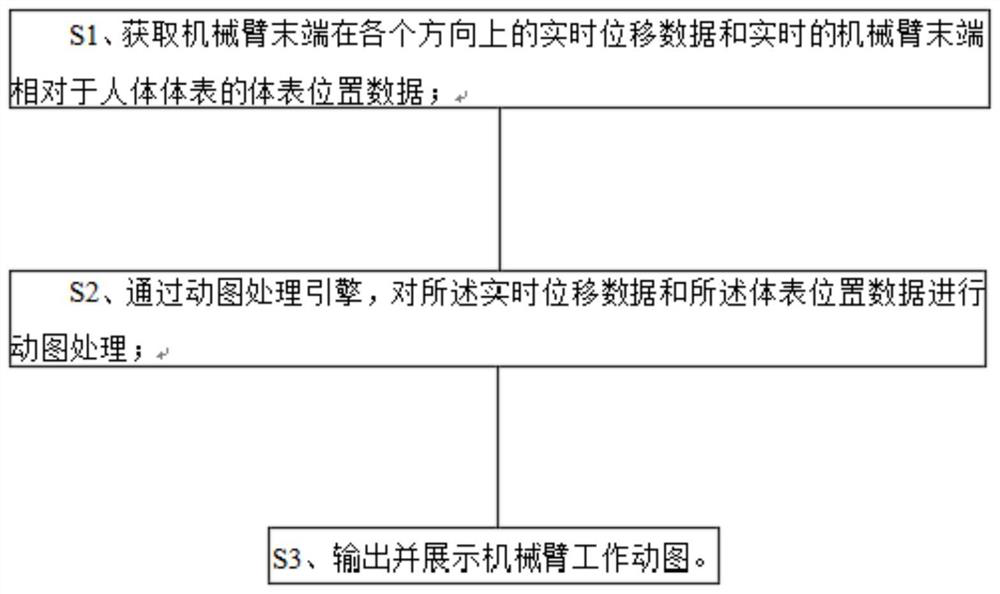
[0069] Such as figure 1 As shown, according to one aspect of the present disclosure, a method for dynamically displaying a moving picture of a position of a robot arm is provided, including the following steps:
[0070] S1. Obtain real-time displacement data of the end of the robotic arm in various directions and real-time body surface position data of the end of the robotic arm relative to the body surface of the human body;
[0071] According to the real-time displacement data of the end of the manipulator in various directions and the real-time position data of the end of the manipulator relative to the body surface of the human body, the present invention establishes and displays the feedback information of the relative position information between the end of the manipulator and the human body, in order to This enables the physical therapy equipment to have real-time dynamic display information and better control the walking of the robotic arm;
[0072] Therefore, it is n...
Embodiment 2
[0138] In this embodiment, a control terminal is provided, which is used for connecting and communicating with the mechanical arm control system of the intelligent human body meridian conditioning equipment, so as to facilitate remote control of the action of the mechanical arm.
[0139] The control terminal is connected to the TCP / IP port of the robotic arm controller, and through the TCP / IP link, real-time mechanical arm force status data and position data of the end of the robotic arm on the human body are obtained.
[0140] Such as figure 2 As shown, according to another aspect of the present disclosure, a control terminal is provided, including:
[0141] processor;
[0142] memory for storing processor-executable instructions;
[0143] Wherein, the processor is configured to realize the dynamic display method of the moving picture of the position of the mechanical arm when executing the executable instruction.
[0144] The control terminal in this embodiment of the pr...
Embodiment 3
[0150] According to another aspect of the present disclosure, there is also provided an intelligent body meridian conditioning device, including a robotic arm and the control terminal, the control terminal is electrically connected to the controller of the robotic arm.
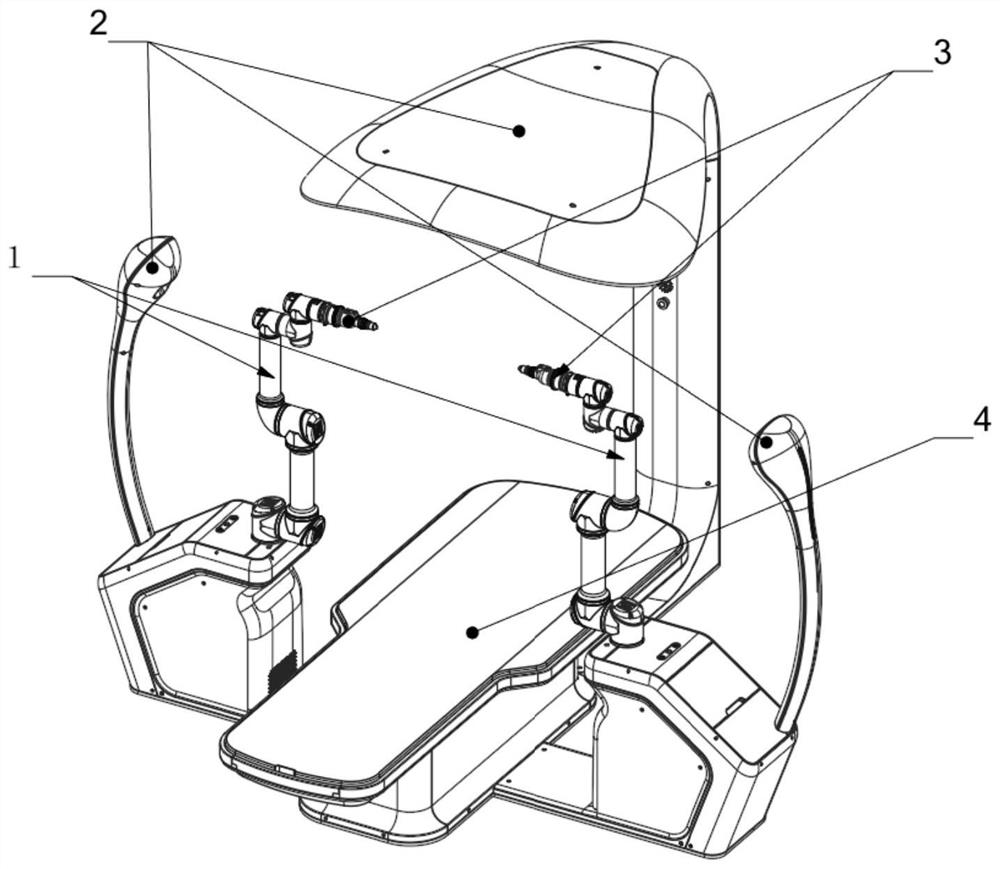
[0151] Such as image 3 As shown, the intelligent human body meridian conditioning device provided in this embodiment includes the robotic arm 1 and the control terminal, and the robotic arm 1 and the control terminal are controlled and executed according to the scheme described in the first embodiment.
[0152] The robotic arm has a control system that can communicate with the control terminal;
[0153] In addition to a pair of mechanical arms 1, the intelligent human meridian conditioning device of this embodiment also includes an AI vision system 2, a vibration conditioning head 3 and a floating conditioning bed 4. The AI vision system 2 is used to identify meridians, and the vibration conditioning head 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More