

Three-arm serial connection type auxiliary operation supernumerary robotic limb based on steel wire driving
A technology for auxiliary operations and robots, applied in the field of robots, can solve problems such as increasing control difficulty and affecting motion stability, and achieve the effects of reducing control difficulty, reducing motion inertia, and improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
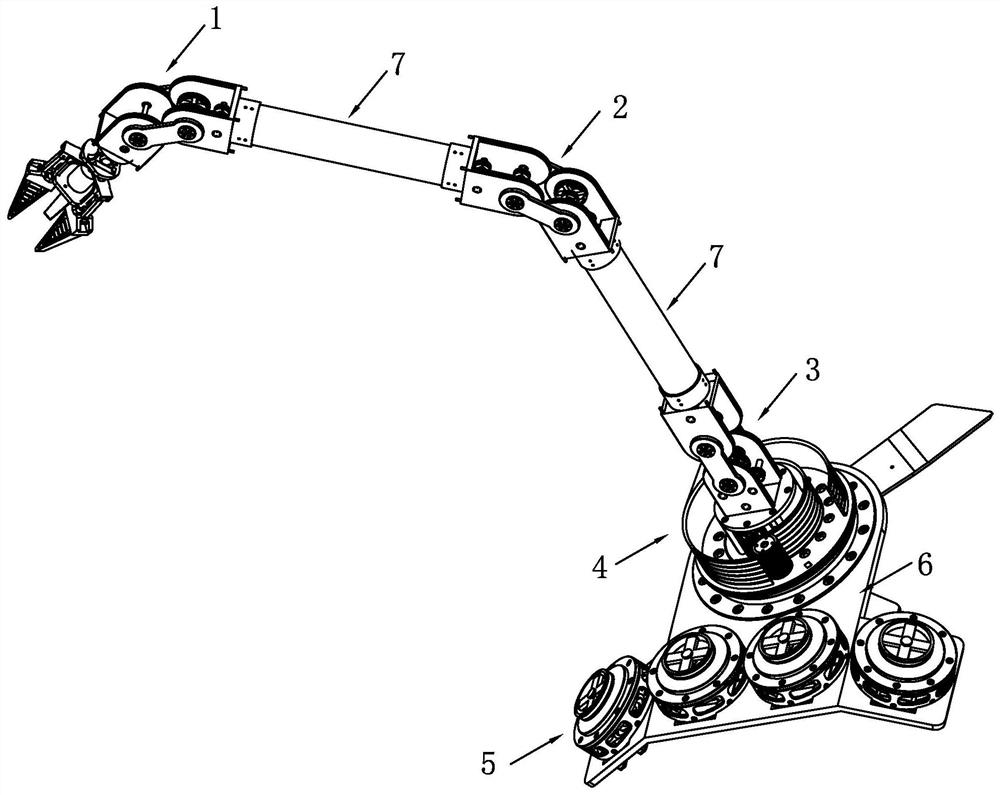
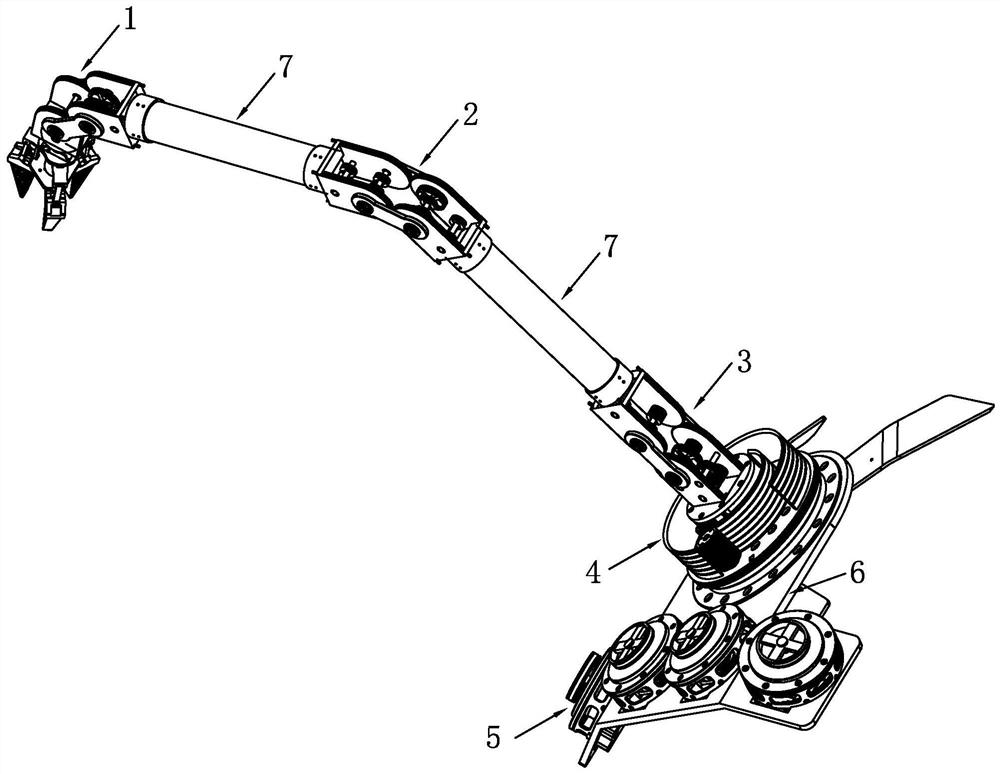
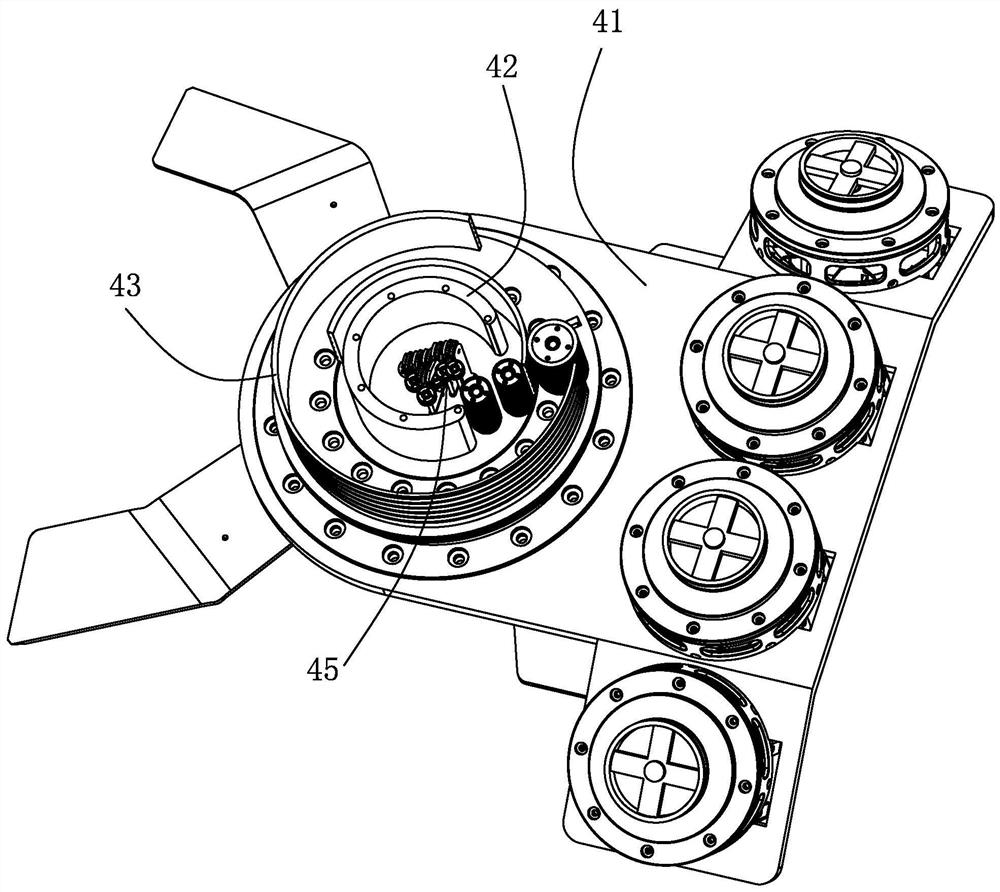
[0036] combine Figure 1-Figure 2 Illustrate that the three-arm tandem extremity assisting robot based on the steel wire drive in this embodiment includes a first vertical rotation joint 1, a second vertical rotation joint 2, a third vertical rotation joint 3, a horizontal rotation joint 4, and a base fixed on the base. The motor group 5 on 6; between the first vertical rotation joint 1 and the second vertical rotation joint 2, between the second vertical rotation joint 2 and the third vertical rotation joint 3 are respectively connected through the hollow arm rod 7, and the third vertical rotation joint The joint 3 is connected with the horizontal rotation joint 4, the first vertical rotation joint 1, the second vertical rotation joint 2, the third vertical rotation joint 3, and the horizontal rotation joint 4 are respectively connected by the motor unit 5 and the wire rope reversing wheel train of the motor unit 5 The direction-changing wire rope group control on the 45 real...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More