

Robot dynamic track planning method for target synchronization
A trajectory planning and dynamic planning technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the inability to guarantee the stability of the robot, inaccurate prediction of the meeting point, and fluctuations in the speed of the conveyor belt, to meet the needs of real-time interpolation calculation, Easy to implement, small computational effort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
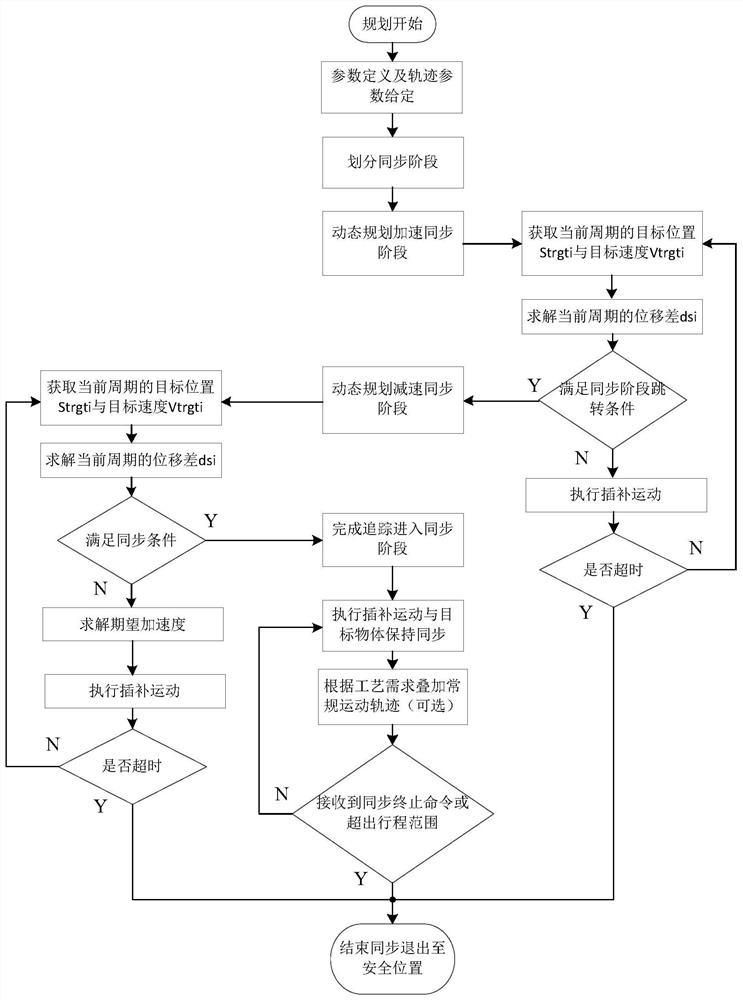
[0060] In order to clearly illustrate the technical characteristics of this patent, the following specific implementation methods, combined with its attached Figure 1-4 , to elaborate on this patent.
[0061] Step 1, determine each parameter involved in the present embodiment and define as follows:
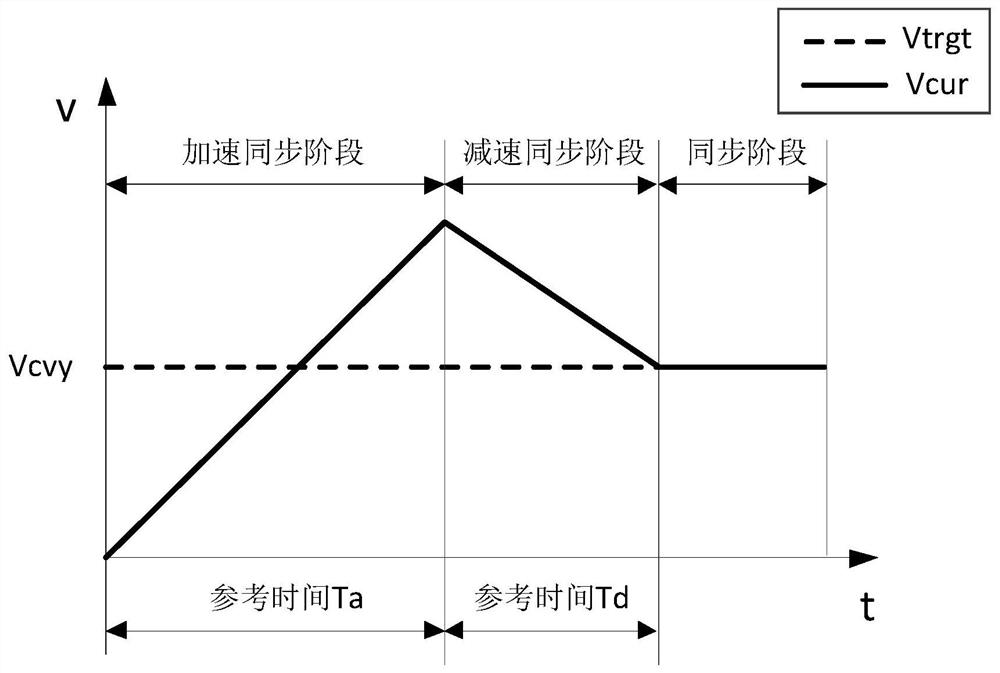
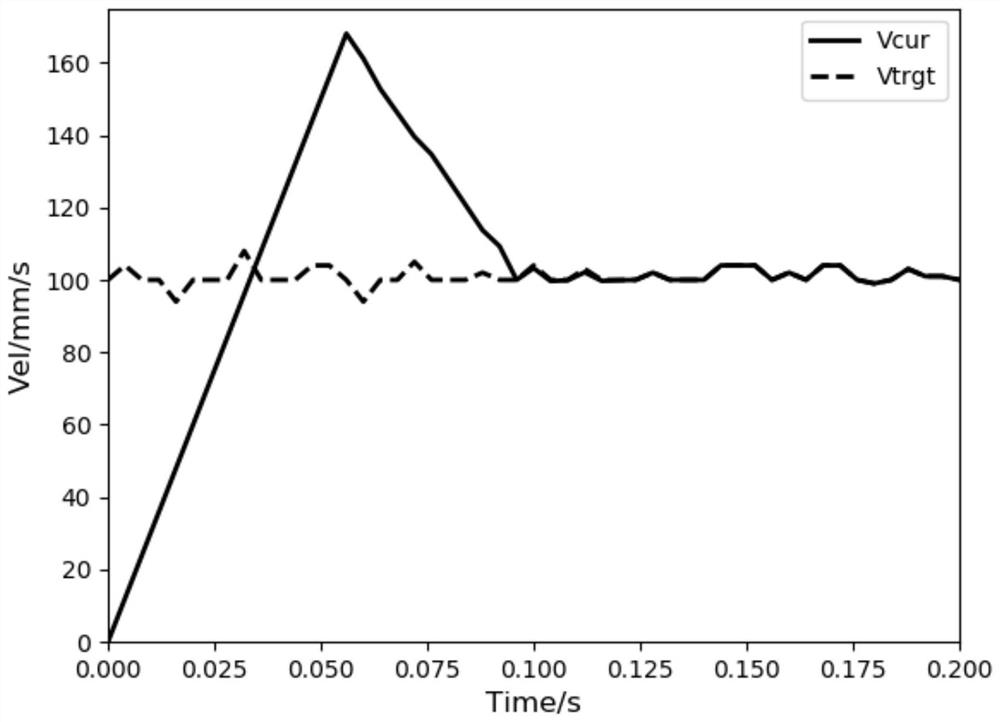
[0062] 1.1. Set the conveyor belt reference speed Vcvy set by the user to 100mm / s;
[0063] 1.2. Obtain the target position in the current interpolation cycle as Strgt i , the target speed is Vtrgt i , the current position of the robot is Scur i , the current speed is Vcur i , the interpolation output position is Scur i+1 , the interpolation output speed is Vcur i+1 , the displacement difference is ds i ;
[0064] 1.3. Let the robot follow the acceleration a m =3000mm / s 2 , define the desired acceleration as a i ;
[0065] 1.4. Set interpolation cycle dt=0.004s;
[0066] 1.5. Define the displacement synchronization tolerance as S ε , the speed synchronization tolera...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More