

Standing wave azimuth angle measurement method based on asymmetric parameter identification of hemispherical resonator gyroscope detection path
A hemispherical resonant gyro and asymmetric technology, applied in the inertial field, can solve the problems of X/Y detection signal phase difference, X/Y detection electrode non-orthogonal, X/Y detection signal gain inconsistency, etc., to improve measurement accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
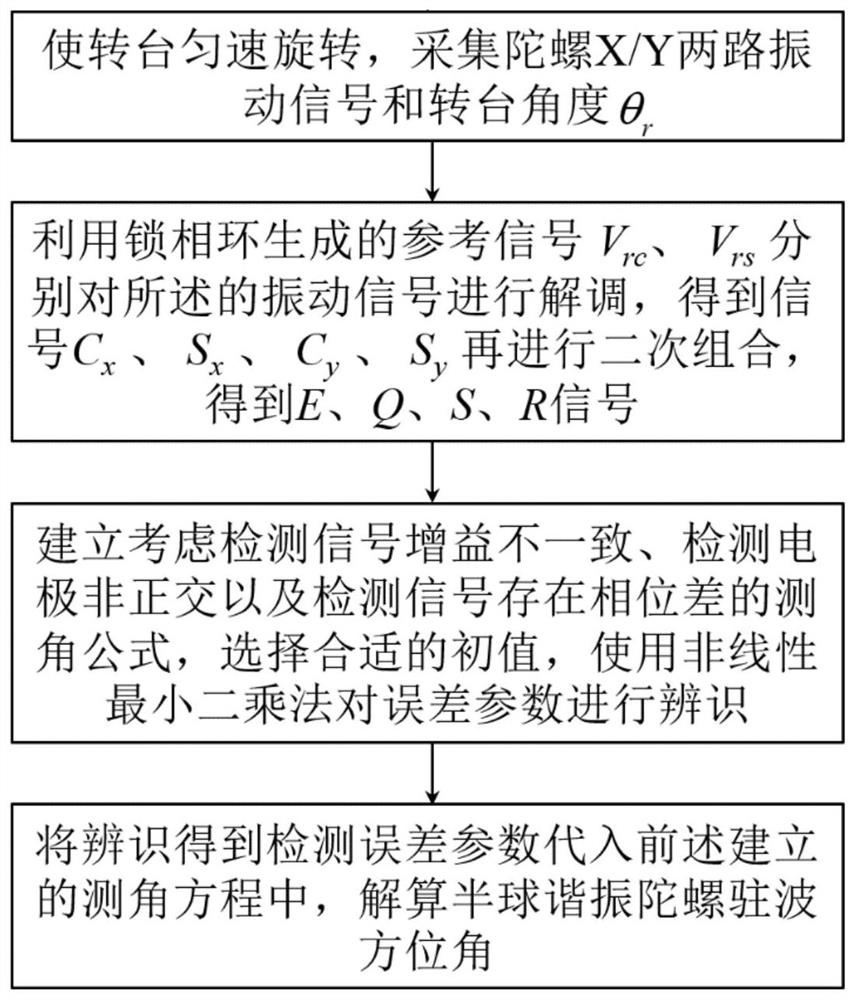
[0056] Specific implementation mode 1. Combination figure 1This embodiment will be described. A standing wave azimuth measurement method based on asymmetric parameter identification of a hemispherical resonator gyro detection channel described in this embodiment, the method specifically includes the following steps:
[0057] Step 1. Make the turntable rotate at a constant speed, and collect the two vibration signals of the hemispherical resonant gyroscope X and Y and the angle θ of the turntable r ;
[0058] Step 2, demodulating the collected X and Y vibration signals to obtain demodulated signals; and combining the demodulated signals to obtain combined signals E, Q, S and R;
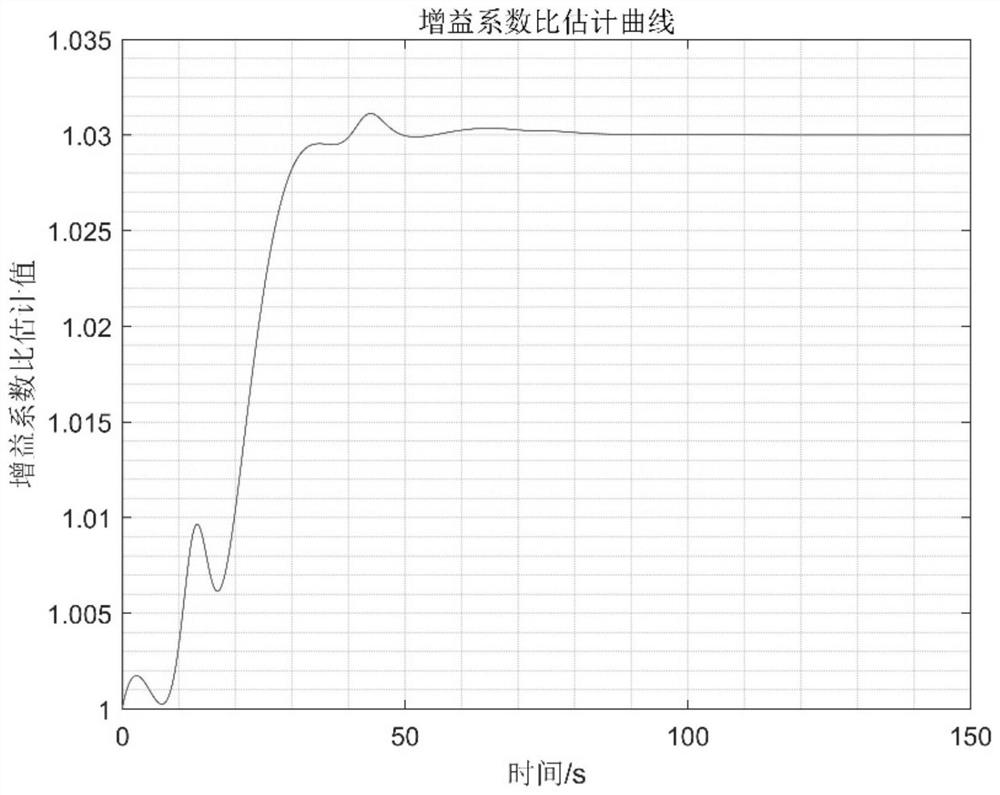
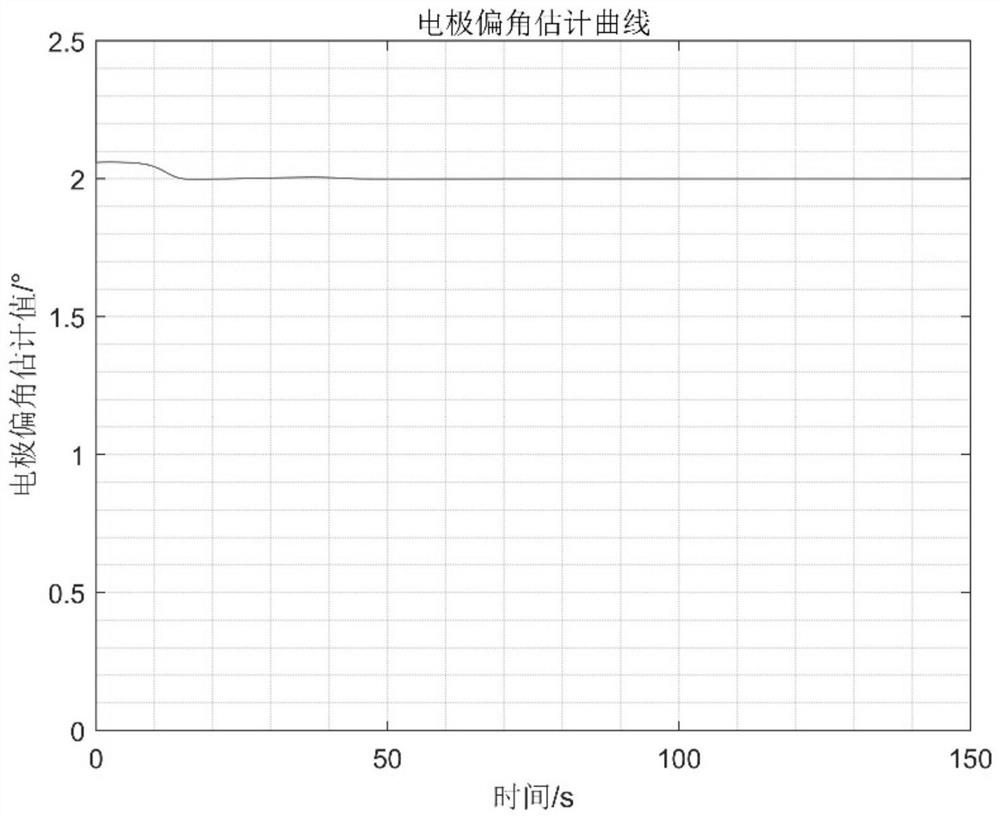
[0059] Step 3, establishing an angle measurement formula that considers the gain inconsistency of the two vibration signals of X and Y, the non-orthogonal detection electrodes of X and Y, and the phase difference between the two vibration signals of X and Y;
[0060] Establish an angle measurement f...
specific Embodiment approach 2
[0065] Specific embodiment 2. The difference between this embodiment and specific embodiment 1 is that the two vibration signals of X and Y are:
[0066] In the case of detection path asymmetry error, the expression of the acquisition signal is:
[0067]
[0068] Among them, x represents the vibration signal of the X channel, y represents the vibration signal of the Y channel, and k x Represents the electrode gain of X channel, k y Represents the electrode gain of the Y channel, h 1 Represents the initial phase of the X-way vibration signal, h 2 Represents the initial phase of the Y-way vibration signal, ω is the vibration frequency of the harmonic oscillator, t is time, θ represents the angle between the antinode axis of the main wave and the X axis, a represents the antinode of the main wave, q represents the antinode of the orthogonal wave, h 2 Represents the initial phase of the vibration signal of channel Y.
[0069] The X-axis and the Y-axis in this embodiment are...
specific Embodiment approach 3
[0071] Specific implementation mode three, the difference between this implementation mode and specific implementation mode one or two is: the described pair of X, Y two-way vibration signal that collects is demodulated, and its specific process is:
[0072] Step 21, using a phase-locked loop to generate a reference signal V rc , V rs ;
[0073] V rc =2cos(ωt+h)
[0074] V rs =2sin(ωt+h)
[0075] Among them, h represents the initial phase of the reference signal;
[0076] Step 22, using the generated reference signal to demodulate the two vibration signals of X and Y;
[0077]
[0078] Among them, C x , S x 、C y and S y is the demodulated signal, β 1 and beta 2 represents an intermediate variable.
[0079] Other steps and parameters are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More