

Trajectory tracking control method and device for underwater swimming mechanical arm with energy optimization
A trajectory tracking and energy optimization technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve the effects of simplifying design, ensuring accuracy, and ensuring practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
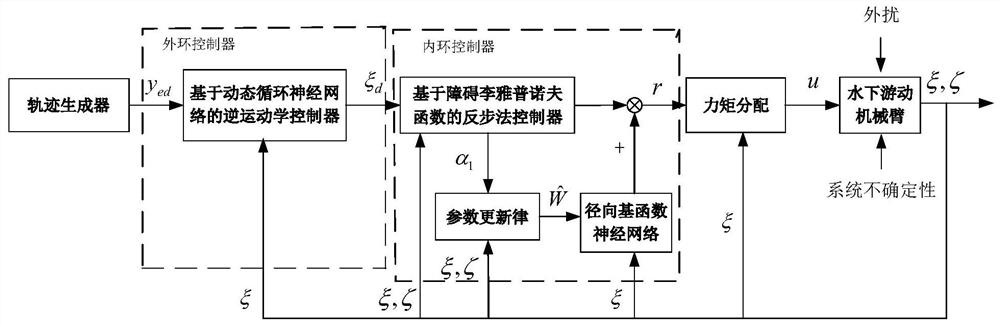
[0064] An embodiment of the present invention provides a trajectory tracking control method for underwater mobile manipulators with energy optimization, see figure 2 , the method includes the following steps:
[0065] 101: In the design of USM generalized coordinate-velocity-level redundancy solution problem, the goal is to minimize the restoration torque and end-point precise tracking, while considering joint constraints and actuator configuration singular point avoidance [1] , the control objective of the inverse kinematics controller is described as a multi-objective optimization problem, and the optimization problem is transformed into a quadratic programming problem with constraints;
[0066] Among them, the redundant solution solving problem is formulated as a constrained multi-objective optimization problem. On this basis, the USM generalized coordinate-velocity level redundant solution solution problem is considered, and the optimization problem is transformed into a...
Embodiment 2
[0074] The scheme in embodiment 1 is further introduced below in conjunction with specific calculation formulas and examples, see the following description for details:
[0075] The technical solution adopted in the embodiment of the present invention is an underwater mobile robot track tracking control method with energy optimization, and the specific steps are as follows:
[0076] 201: Establish kinematics and dynamics models of underwater swimming manipulators;
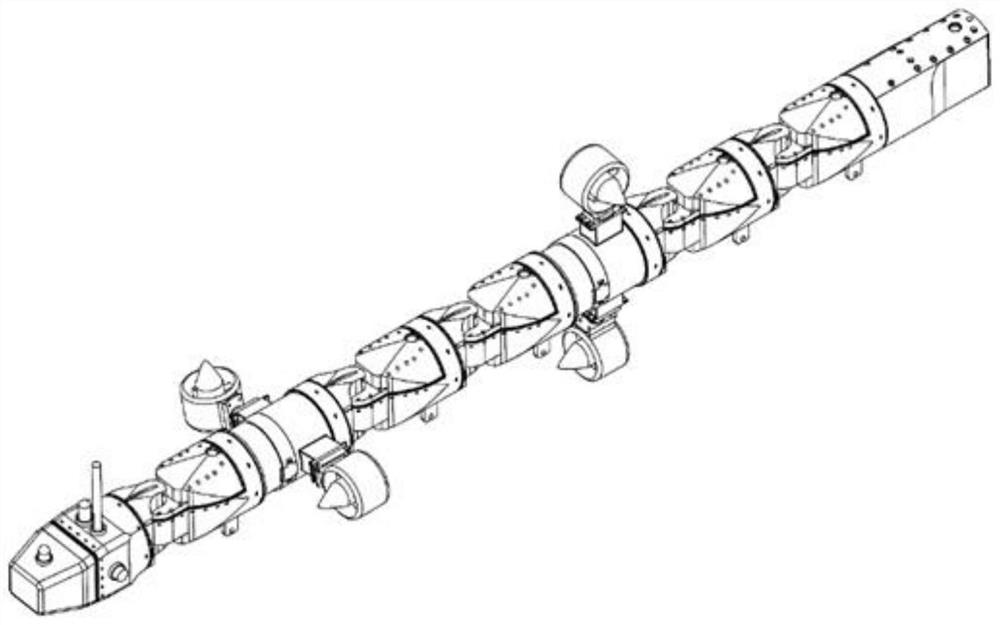
[0077] Wherein, this step 201 includes: defining the world inertial coordinate system and the robot body coordinate system, selecting the North East coordinate system (known to those skilled in the art) as the world coordinate system, defining the tail of the underwater swimming manipulator as the base, USM The complete state vector of position, pose and shape of is defined as Among them, n=10 represents the number of connecting rods, h=2 represents the number of vector thruster modules, Indicates the position ...
Embodiment 3
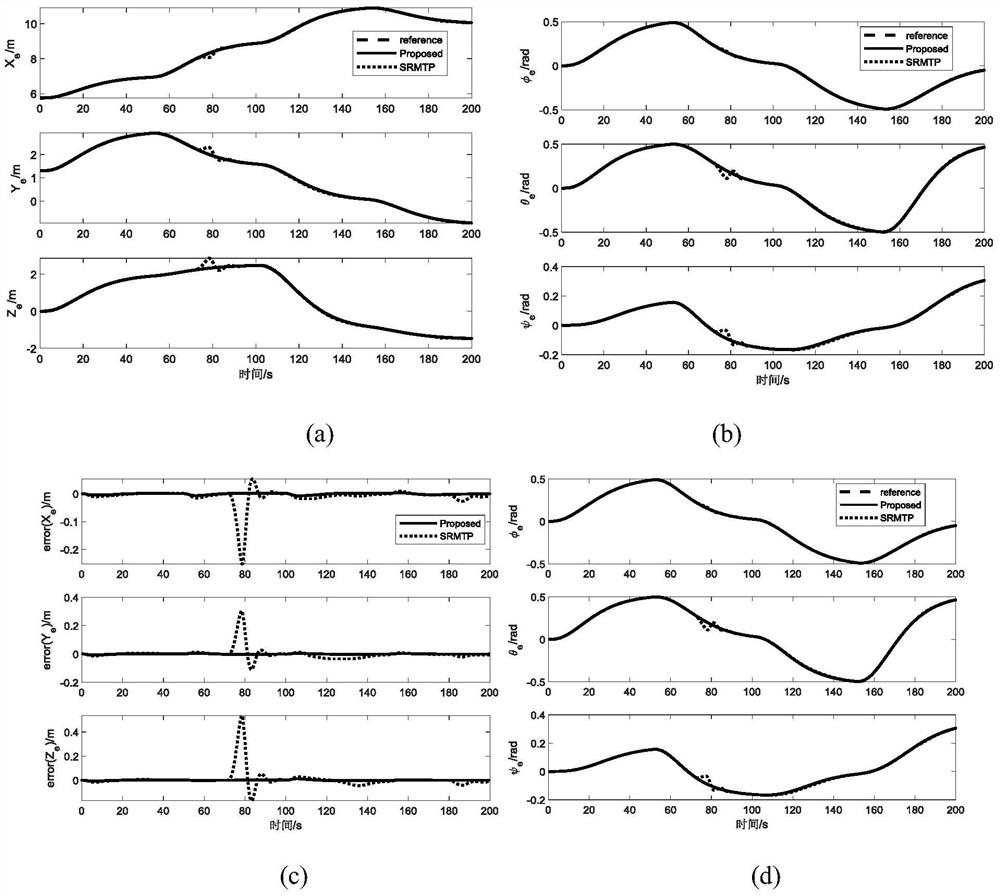
[0203] In order to verify the effectiveness of the control algorithm designed in the present invention, MATLAB is used as the simulation platform to carry out the simulation verification of USM trajectory tracking control, and two test cases are set to verify the effectiveness of the inverse kinematics controller design and the dynamics controller design respectively. sex. During the simulation, continuous trajectories between the end-effector setpoints were generated based on the filter with a step size set to 0.02 s. Among them, the initial pose and configuration of USM are set as:
[0204] ξ(0)=[0 0 0 0 0 0 0 45deg 0 -45deg 0 45deg 0 -45deg 0 45deg 45deg] to ensure the effective configuration of the actuator at the initial moment, the initial speed is set to ζ(0)=zeros(17,1 ).
[0205] Inverse kinematics controller parameter setting: k e = 2,c 1 =10,c 2 = 1, ε r =40,ε μ = 0.05, ε σ =0.05, α μ =0.05, α σ =0.05, ζ dr (0)=0 17×1 , k ζ =1,q min =-80 / 180π(rad),q m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More