

Wheeled robot odometer device based on magneto-rheology and control method
A wheeled robot and odometer technology, applied in the field of robot navigation, can solve the problems of uneven wheel pressure, the influence of the normal operation of the robot, and the influence of the odometer measurement accuracy, and achieve the effect of ensuring the measurement accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0029] This embodiment discloses a wheeled robot odometer device based on magnetorheology.
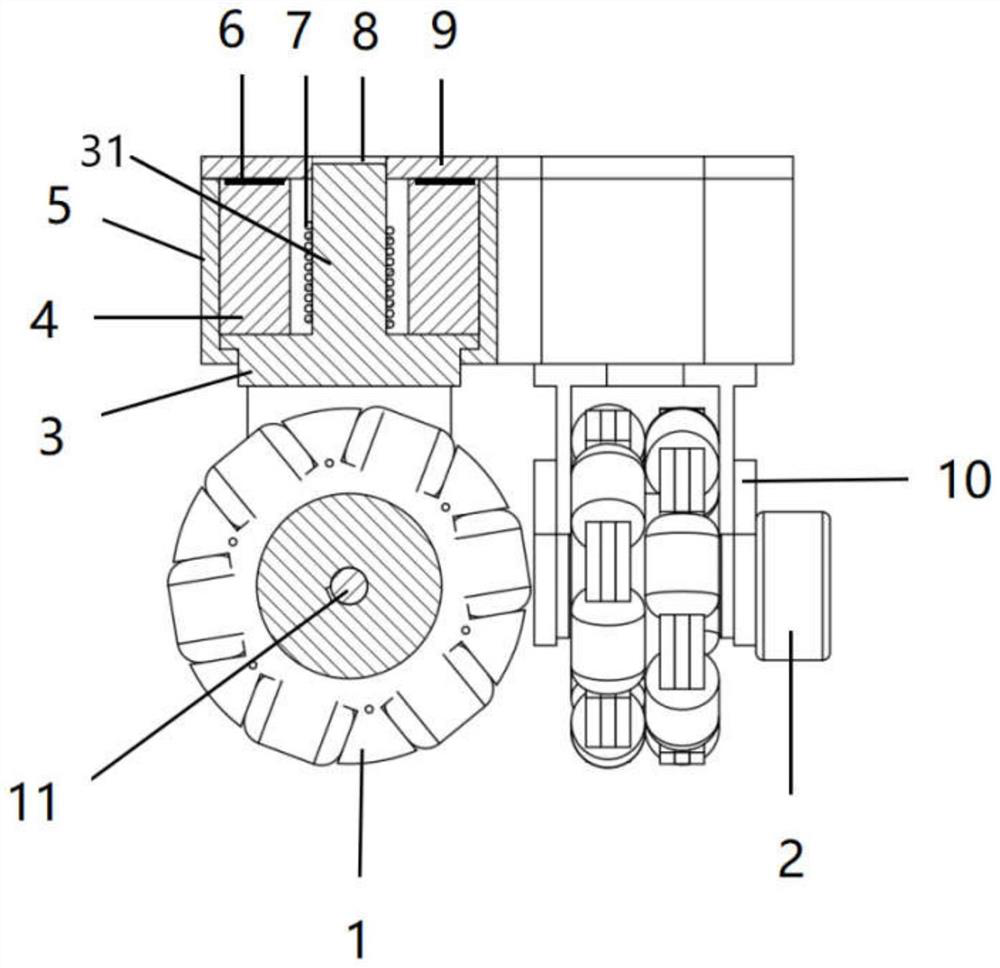
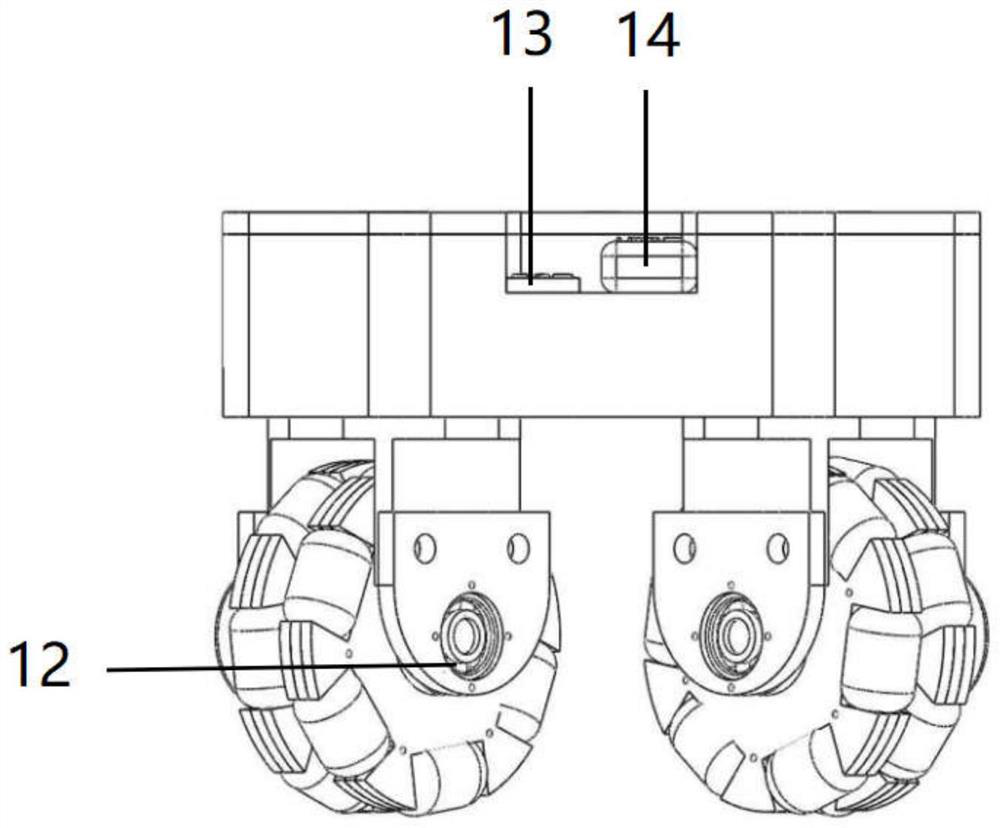
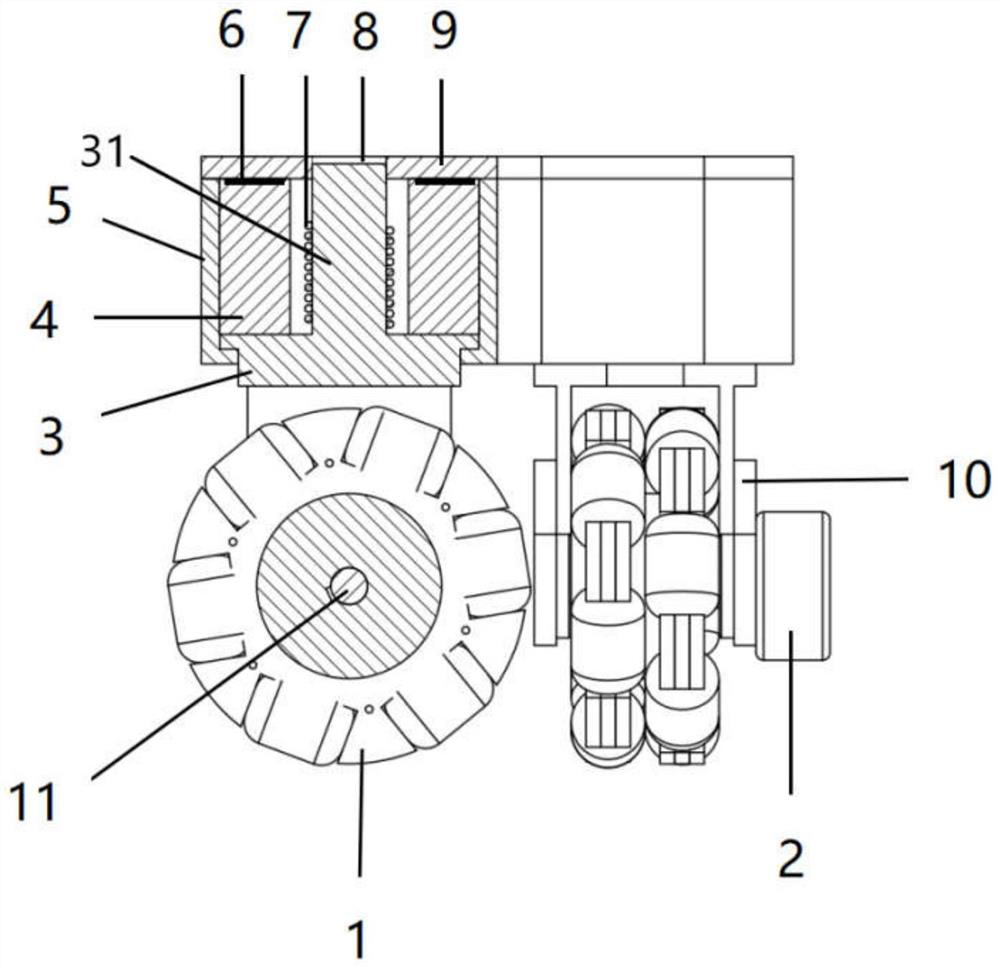
[0030] Such as figure 1 with figure 2 As shown, the wheeled robot odometer device based on magnetorheology includes a metering assembly and a wheel assembly arranged on the robot body; it also includes a pressure adjustment assembly arranged between the robot body and the wheel assembly;
[0031] The pressure regulating assembly includes a cylindrical casing 5 whose upper end is installed on the robot body, an adjusting disc 3 which is arranged inside the casing 5 and whose outer peripheral sidewall is in clearance fit with the inner peripheral sidewall of the casing 5, and is arranged on the casing 5. The magnetorheological elastomer 4 inside and between the robot body and the adjustment disc 3; the side of the adjustment disc 3 away from the robot body is used to install the wheel assembly, and the middle part of the side facing the robot body is provided with a The adjustment sha...
Embodiment 2
[0055] On the basis of the first embodiment, this embodiment further discloses a control method for a wheeled robot odometer device.
[0056] A control method for a wheeled robot odometer device based on magneto-rheological technology, comprising:
[0057] In the absence of an external magnetic field, the odometer device of Embodiment 1 is installed on the installation position of the wheeled robot.
[0058] Since the elastic modulus of the magnetorheological elastomer is E, the elastic deformation of Δl under the pressure of the wheeled robot makes the wheels of the odometer device land flexibly. The positive pressure is
[0059] Positive pressure adjustment: Get the positive pressure value of the wheel assembly on the ground And judge the positive pressure value Is it within the set desired positive pressure threshold range [F e -δ,F e +δ]: If yes, it means that the positive pressure is normal; otherwise, control the electromagnetic coil to generate a magnetic field...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More