Contour scanning magnetic wall-climbing robot
A wall-climbing robot and magnetic technology, applied in the field of wall-climbing robots, can solve the problems of large adsorption force, low displacement measurement accuracy, and uneven wall surface, and achieve the effects of reducing adsorption force, ensuring accuracy, and reducing wear
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0025] Figure 2-Figure 8 Embodiment 1 of the present invention is shown.
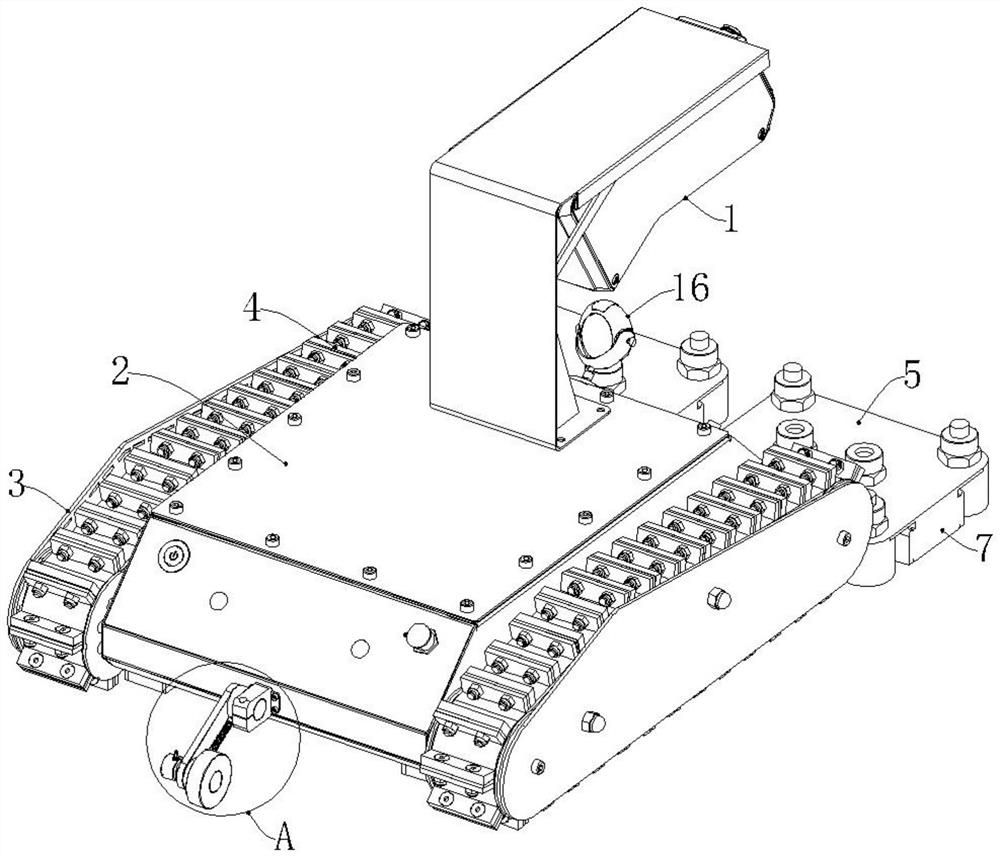
[0026] A contour-scanning magnetic wall-climbing robot includes a magnetic crawler chassis, a laser scanner 1, a camera 16, a ball-type magnetic adsorption mechanism, and a displacement measurement mechanism.
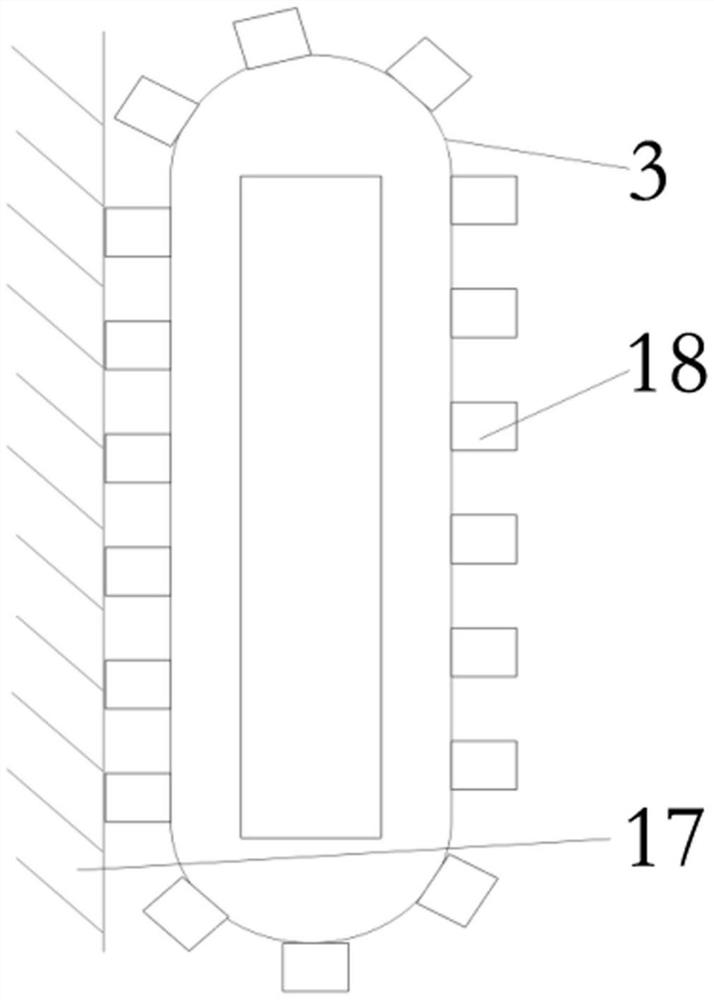
[0027] The magnetic crawler chassis includes a chassis body 2, a crawler belt 3, a first permanent magnet 4 and a third permanent magnet 15, the crawler belt 3 is installed on both sides of the chassis body 2, and the first permanent magnet 4 is installed on the crawler belt 3 , the third permanent magnet 15 is mounted on the bottom of the chassis body 2 (see Figure 7 ). .
[0028] The laser scanner 1 and the camera are installed on the chassis body 2 .
[0029] The ball-type magnetic adsorption mechanism includes a ball bracket 5 , a ball 6 , a second permanent magnet 7 and a connecting frame 12 . The ball-type magnetic adsorption mechanism is provided with two groups and arranged side by...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More