

A method and device for stabilizing control based on particle active disturbance rejection
A stable control method and ADRC technology, applied in the field of aircraft control, can solve problems such as missing tracking targets, large changes in friction torque and wind resistance torque, random changes in sensor boresight pointing, etc., to improve imaging stability, Isolate the effects of internal and external disturbances
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
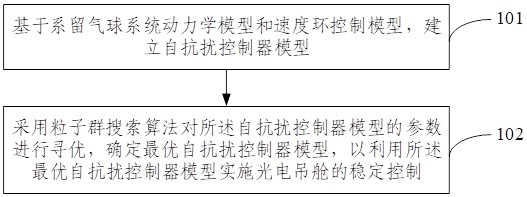
[0066] In order to make the purpose, technical solutions and advantages of the present invention clearer, the technical solutions in the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the present invention. Obviously, the described embodiments are part of the embodiments of the present invention , but not all examples. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
[0067] For the above-mentioned difficult problems in the stability control of the ball-borne photoelectric pod, it is necessary to overcome the random influence of the wind on the tethered balloon platform, and improve the anti-interference ability of the photoelectric pod while ensuring the rapid response of the photoelectric pod, that is, to improve the photoelectric pod. The stability of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More