

Orthopedic navigation surgical robot equipment
A surgical robot and orthopedic technology, applied in the direction of surgical robots, surgical manipulators, surgical navigation systems, etc., can solve the problems that the height cannot be controlled and adjusted artificially, the angle cannot be adjusted, and the volume and weight are large, so as to achieve the convenience of adjusting the moving direction and reduce the Effects of X-ray irradiation and improvement of surgical efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
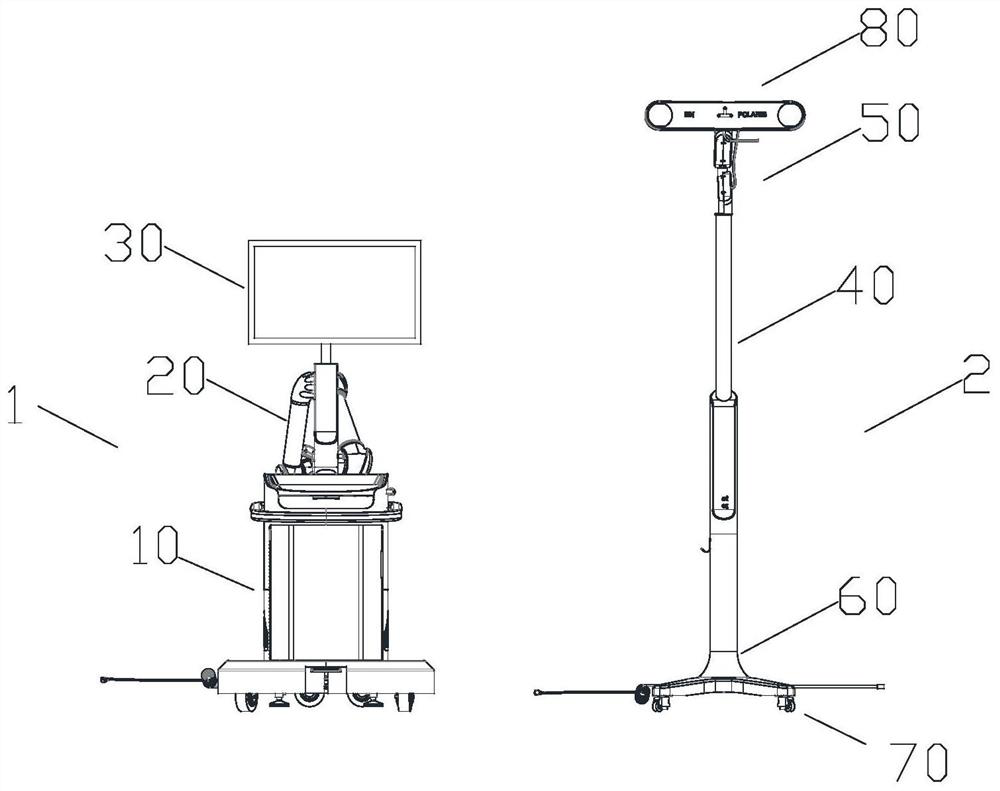
[0117] A robotic device for orthopedic navigation surgery, such as figure 1 As shown, it consists of an operation assembly 1 for surgical operations and a navigation assembly 2 for collecting and supervising the relative position information of orthopedic lesions and surgical instruments in patients.
[0118] Wherein, the operation assembly 1 is provided with an organic main body 10 , a mechanical arm 20 and a display device 30 , and the mechanical arm 20 and the display device 30 are respectively fixedly assembled on the main body 10 .
[0119] Wherein, the navigation assembly 2 is provided with a support part 40, an angle adjustment device 50 for driving the probe head 80 to adjust the angle, an electric lifting mechanism 60 for driving the support part 40 to move up and down as a whole, a fixed seat 70 and a probe head 80, and The lifting mechanism 60 is assembled on the fixed seat 70, one end of the electric lifting mechanism 60 is fixedly assembled on the fixed seat 70, t...
Embodiment 2
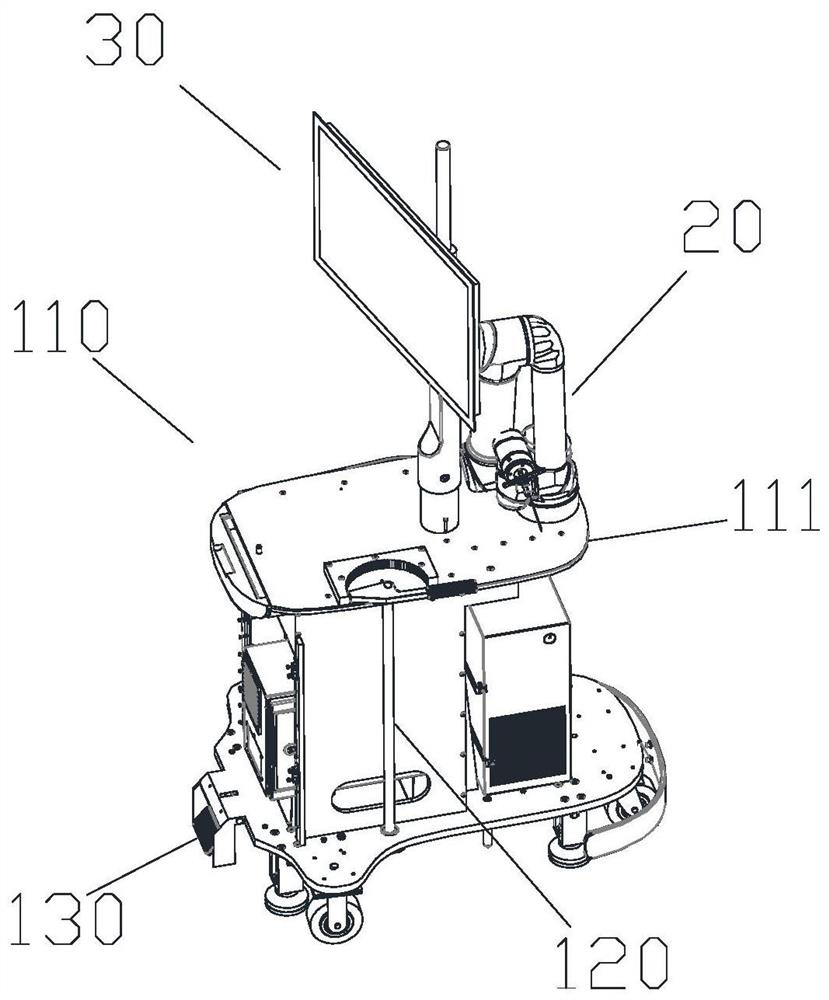
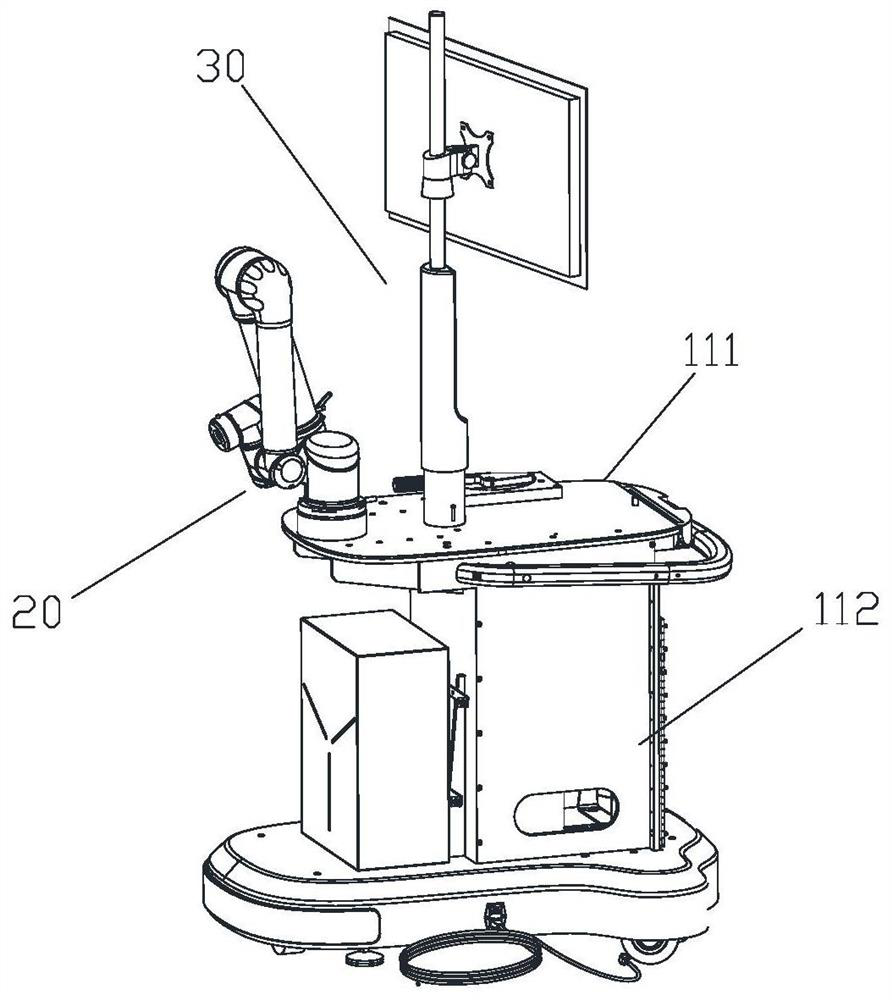
[0122] A robotic device for orthopedic navigation surgery, such as Figures 2 to 5 As shown, other features are the same as in Embodiment 1, and also have the following features: when the orthopedic navigation surgery robot is in normal use, the ground direction is defined as the bottom, the main body 10 is provided with a force frame 110, the mechanical arm 20 and the The above-mentioned display devices 30 are all assembled above the force-bearing frame 110 .
[0123] The force frame 110 is provided with an upper panel 111, a support frame 112, a plurality of support beams 113 and a bottom plate 114 for supporting the robotic arm 20 of the orthopedic navigation surgery robot, the upper panel 111 is fixedly assembled on the top of the support frame 112, and the support frame 112 is fixed Installed above the bottom plate 114 , a plurality of support beams 113 are respectively fixed to the support frame 112 , and the plurality of support beams 113 are arranged in parallel, and t...
Embodiment 3
[0138] A robotic device for orthopedic navigation surgery, such as Figures 6 to 8As shown, other features are the same as in Embodiment 1, and also have the following features: the mechanical arm 20 of the present invention is provided with a plurality of joint mechanisms, and the plurality of joint mechanisms are assembled in sequence, and the joint mechanism assembled with the main body 10 is defined as the first joint The mechanism 21 and the joint mechanism assembled with the first joint mechanism 21 are defined as the second joint mechanism 22 . There are 6 joint mechanisms in this embodiment.
[0139] The distance between the mechanical arm 20 and the display device 30 is defined as A, the overall length between the first joint mechanism 21 and the second joint mechanism 22 is defined as B, and A>B>0 exists.
[0140] It should be noted that the distance between the mechanical arm 20 and the display device 30 is greater than the overall length between the first joint me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More