Quick hand traction device assisted by soft hand exoskeleton
A stretching device and exoskeleton technology, applied in the field of hand rapid stretching devices, can solve the problems of limited force output by exoskeleton robots, inability to meet the clinical needs of spastic hand stretching, and low output frequency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
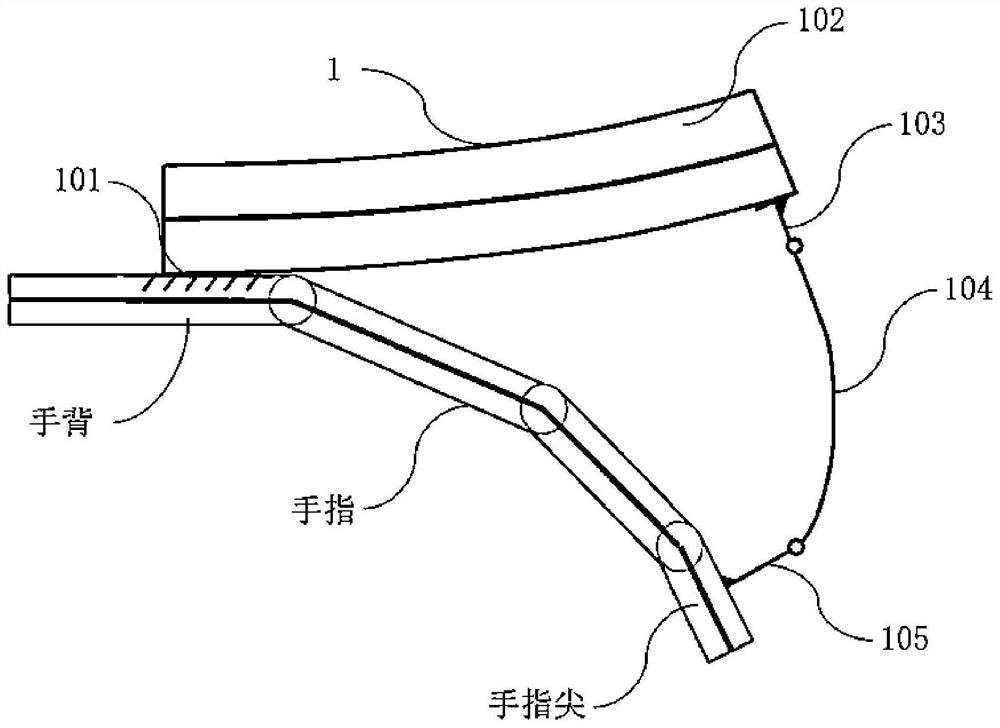
[0071] Combine below Figure 1 to Figure 11 Let us describe the soft hand exoskeleton-assisted rapid hand stretching device according to the embodiment of the present invention, which adopts the method of reverse stretching and finger stretching to relieve hand spasm caused by nervous system diseases.
[0072] Such as figure 1 As shown, the soft hand exoskeleton-assisted rapid hand pulling device according to the embodiment of the present invention includes a soft hand exoskeleton 1 and a control system. end 103, connecting rod 104 and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More