

Robot motion information planning method and related device
A technology of robot motion and motion information, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of not considering time, energy consumption, and the inability to meet the high efficiency and low energy consumption of industrial robots, and achieve the effect of improving the optimization accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
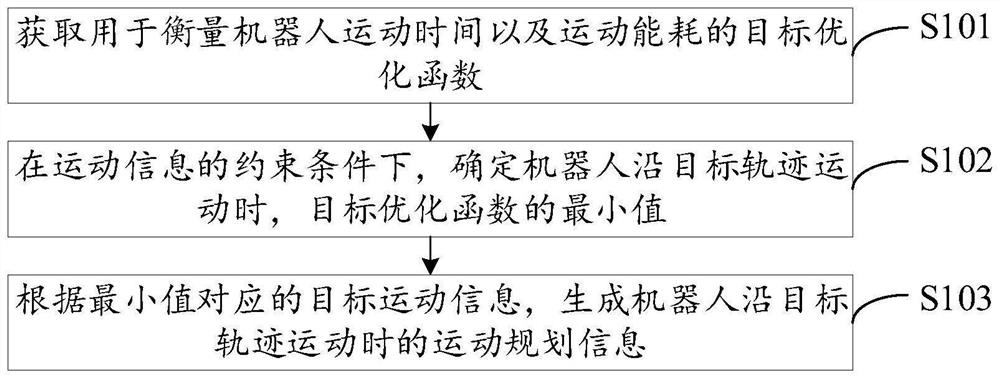
[0048] S103-1. Acquire target motion information corresponding to the minimum value.
[0049] S103-2, performing interpolation processing on the target motion information through a quintic polynomial to obtain motion planning information when the robot moves along the target trajectory.
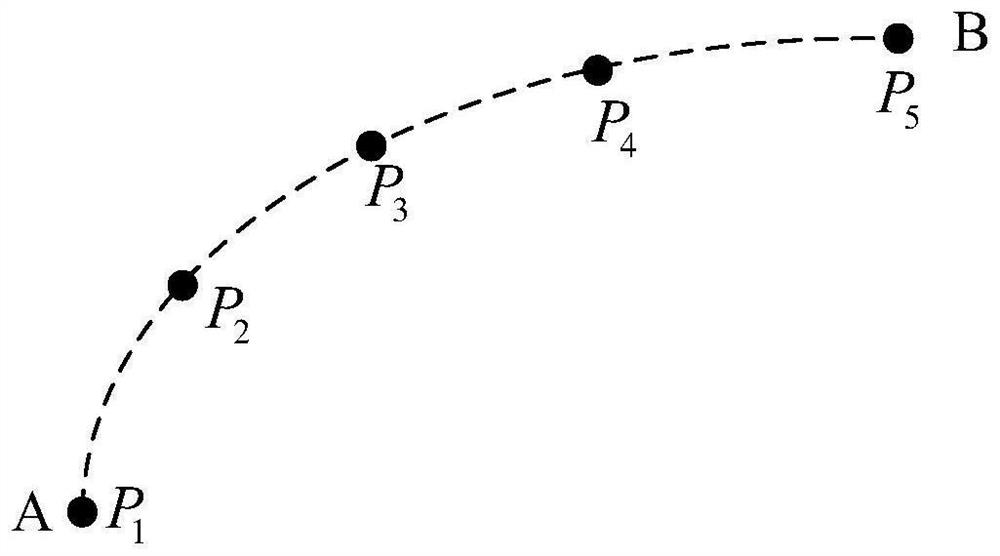
[0050] Exemplary, continue to see image 3 Multiple sampling points in , denoted as P 1 ,P 2 ,P 3 ,P 4 ,P 5 ; For the convenience of description, select P 2 and P 3 Be explained. When the objective optimization function is minimized, it can be solved that the end of the industrial robot is located at P 2 When , the respective angles, rotational speeds and moments of the six joints; and the end at P 3 , the respective angles, rotational speeds and moments of the six joints. Therefore, when the end of the industrial robot moves from P 2 Movement to P 3 During this period, it is necessary to fit the respective angles, rotational speeds and torques of the six joints by means of interp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More