Propulsion motor model-free adaptive prediction control method of neural network observer
A model-free self-adaptive, propulsion motor technology, applied in the direction of self-adaptive control, general control system, control/regulation system, etc. Robustness, the effect of reducing the effect of disturbances
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] Below in conjunction with accompanying drawing, the present invention is described in more detail:
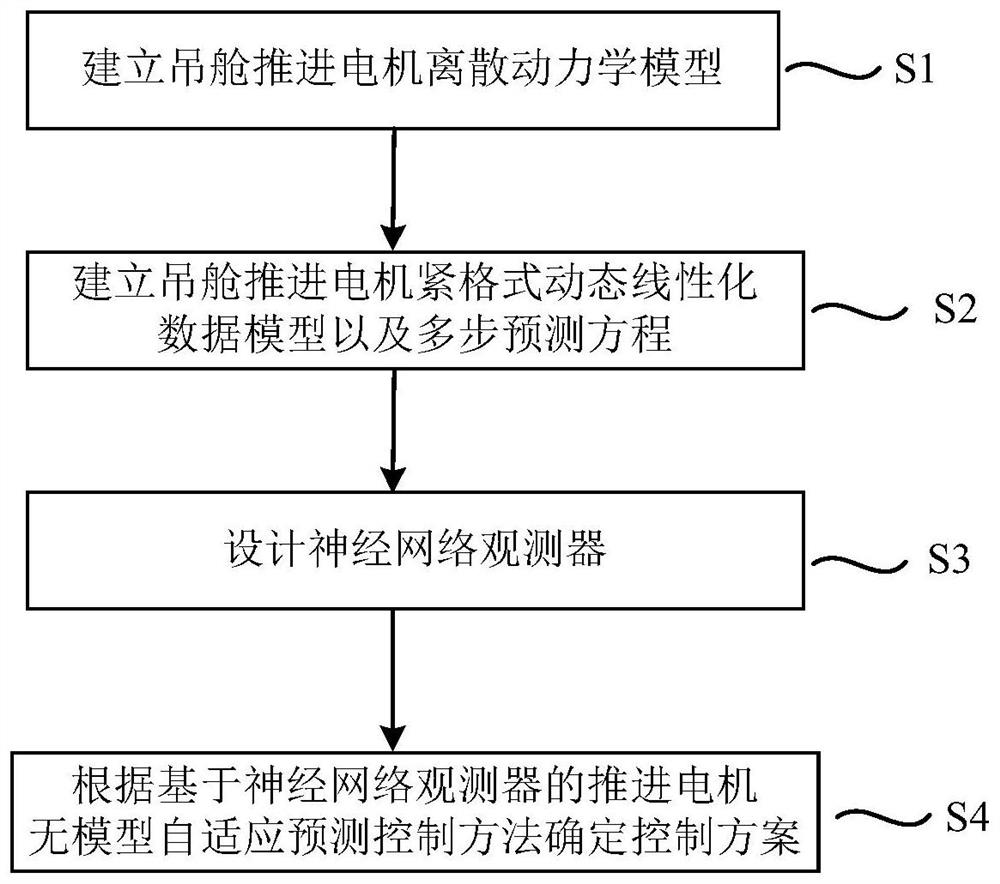
[0071] see figure 1 As shown, the semi-submersible ship pod propulsion motor control scheme in this embodiment specifically includes the following steps:
[0072] Step S1: Establish the pod propulsion discrete dynamics model:
[0073] The permanent magnet synchronous motor used for pod propulsion is a machine with nonlinear magnetization characteristics and saturation effects. In order to simplify the analysis, the following assumptions are made: 1) Neglecting iron core saturation, eddy current and hysteresis loss; 2) Neglecting commutation armature reaction in the process; 3) The magnetic field generated by the permanent magnet and the induced magnetic field generated by the three-phase winding are sinusoidally distributed; 4) The stator winding current only generates a sinusoidally distributed magnetic potential in the air gap, without high-order harmonics, and the po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More