

Air multi-agent distributed elliptical surround guidance method with space-time decoupling characteristic
A multi-agent, intelligent body technology, applied in the two-dimensional position/channel control, non-electric variable control, control/regulation system and other directions, can solve the problems of easy saturation of the controller, inability to guarantee forward speed, etc. Stability, avoiding the risk of multi-agent collision, and ensuring the effect of invariance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
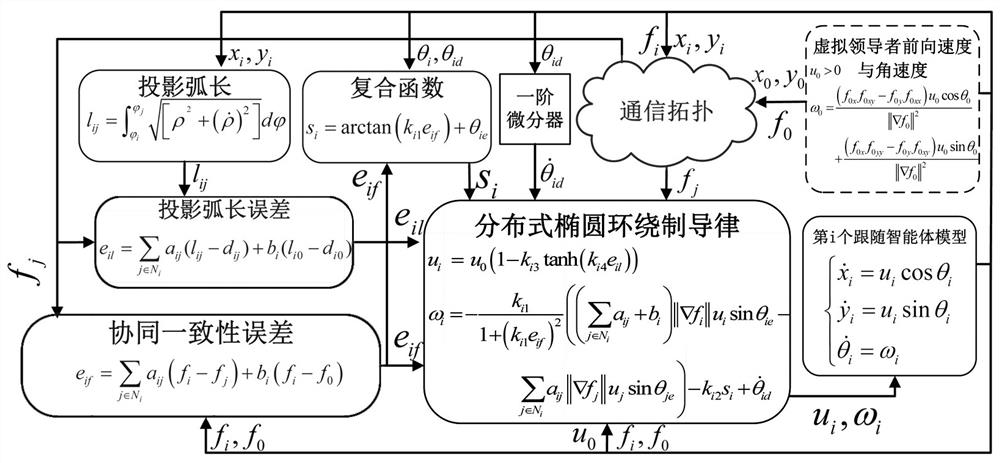
[0036] What this embodiment involves is an air multi-agent distributed elliptical surround guidance method with the characteristics of time-space decoupling, which includes the following steps:
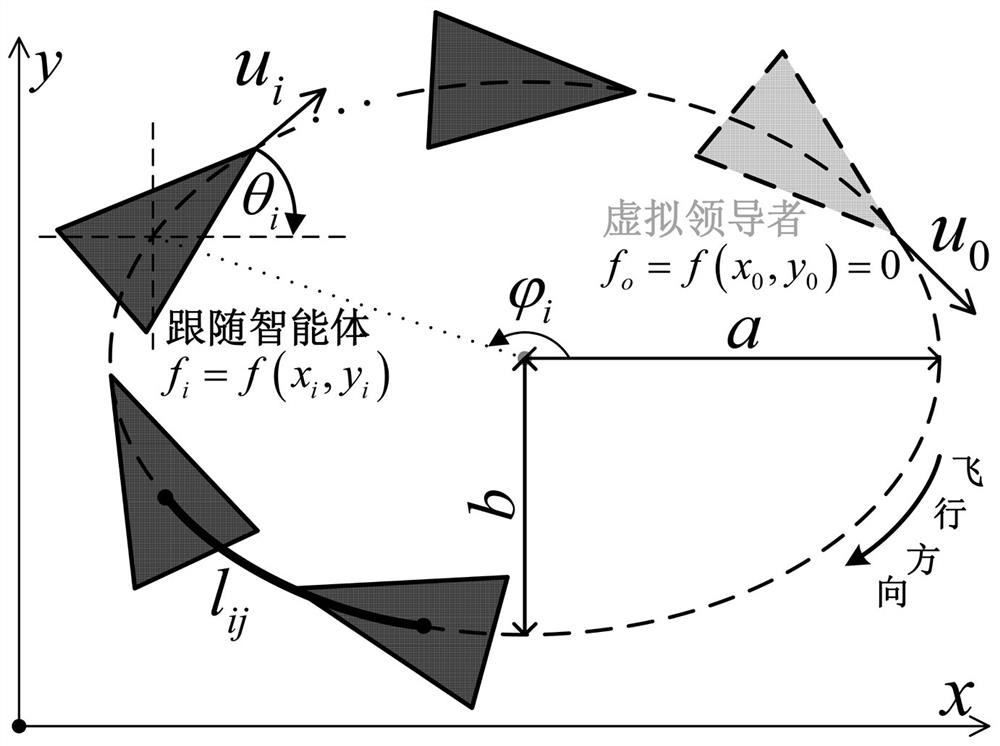
[0037] (1) For the scenario of multi-agent distributed periodic target / area observation tasks in the air, the implicit description of the elliptical reference path in the given inertial system:
[0038] f(x,y)=(bx) 2 +(ay) 2 -(ab) 2 =0 (1)
[0039] Among them, x and y are the positions of the following agent in the inertial system, a and b are positive design parameters, respectively representing the major semi-axis and minor semi-axis of the ellipse reference path;
[0040] Assign the preset elliptical reference path to the virtual leader in the cluster system, and design the forward velocity u necessary to drive the virtual leader's nonholonomic co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More