

Improved slam and multi-sensor fused robot positioning method and system
A technology of multi-sensor fusion and robot positioning, which is applied in satellite radio beacon positioning systems, radio wave measurement systems, instruments, etc., to achieve the effect of constraining errors and improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0049] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
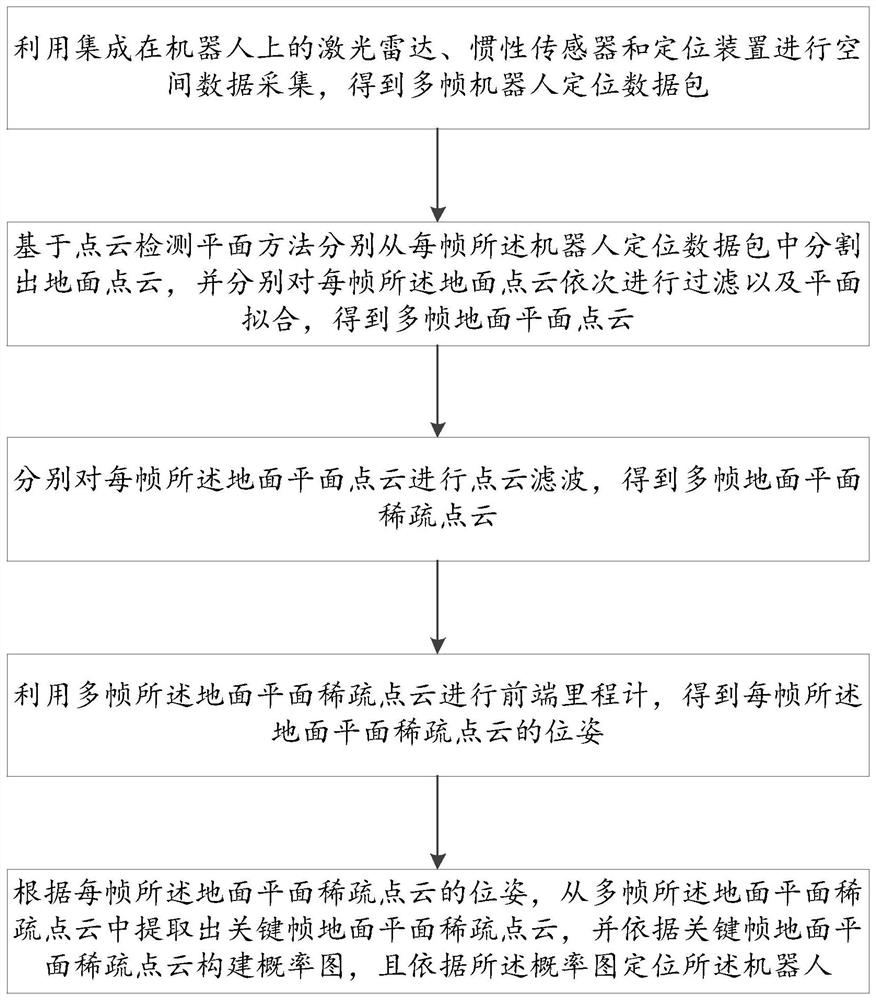
[0050] Such as figure 1 As shown, an improved slam and multi-sensor fusion robot positioning method includes the following steps,
[0051] S1, use the laser radar, inertial sensor and positioning device integrated on the robot to collect spatial data, and obtain multi-frame robot positioning data packets;
[0052] S2. Based on the point cloud detection plane method, the ground point cloud is segmented from the robot positioning data packet in each frame, and the ground point cloud in each frame is filtered and plane fitted in sequence to obtain multiple frames of ground plane point cloud. ;
[0053] S3, respectively performing point cloud filtering on the ground plane point cloud of each frame to obtain multi-fram...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More