

Variable formation incomplete mobile robot consistency control method based on prediction
A mobile robot and control method technology, applied in non-electric variable control, two-dimensional position/channel control, control/regulation system, etc. Optimizing the formation process of formation consistency, efficient execution, and efficient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
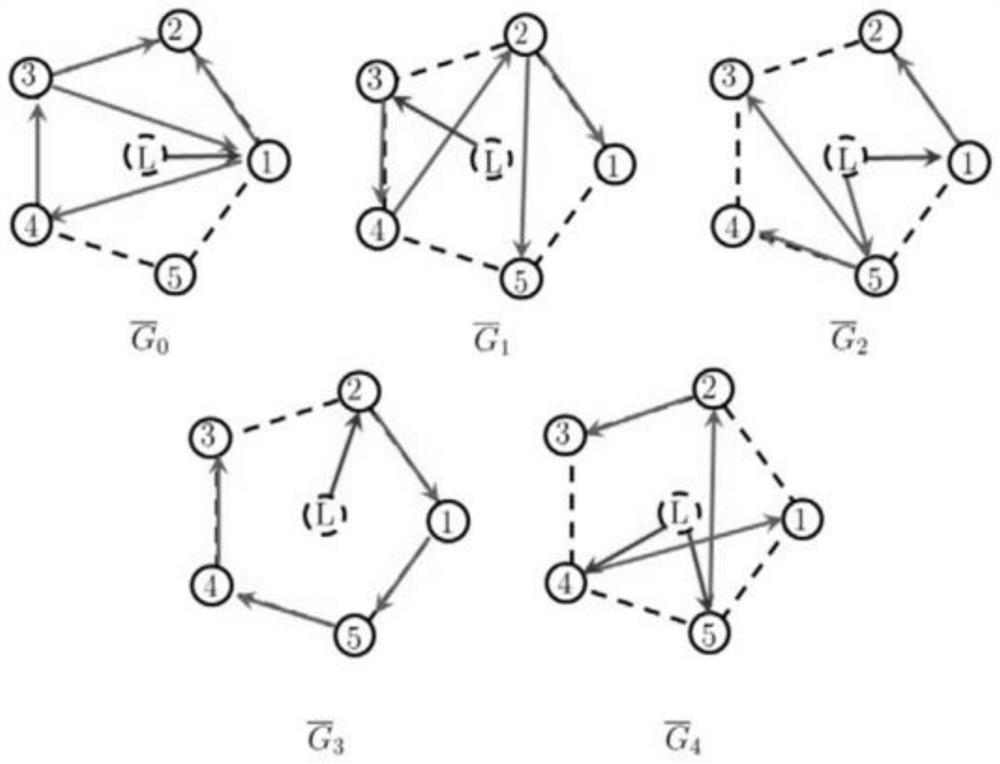
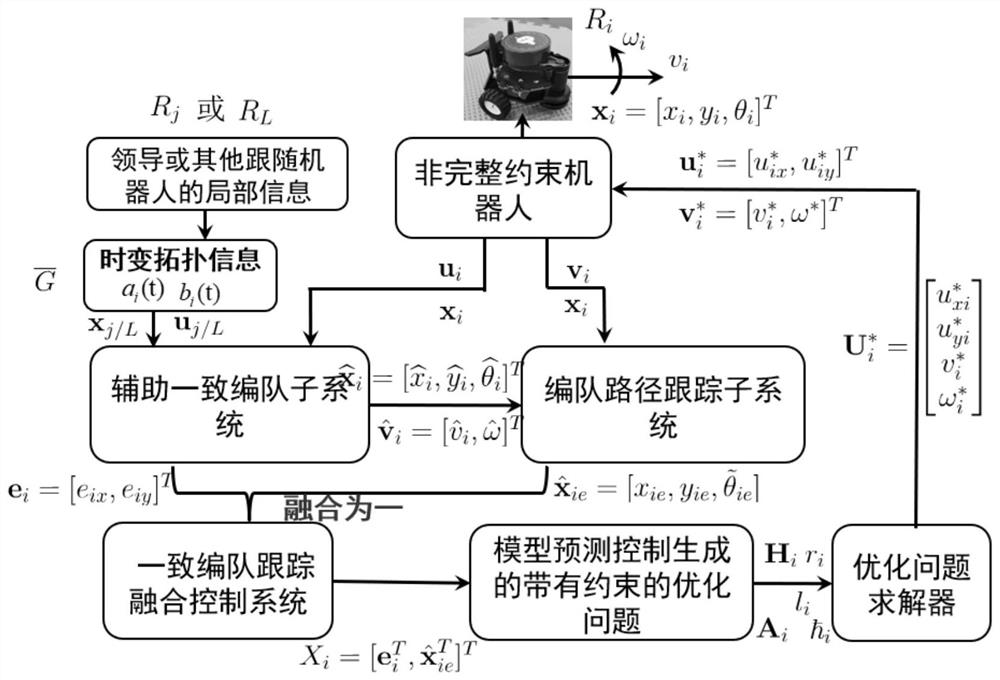
[0085] The present invention constructs a consistent formation fusion system composed of an auxiliary consistent maneuvering subsystem (path planning subsystem) and a formation tracking subsystem, and utilizes the distributed model predictive control (DMPC) method to construct a belt in the prediction time domain. Optimal control problems with system constraints, prediction of future states and consensus formation errors and model optimization with generalized projection neural networks (GPNNs). The designed control system can deal with the generalized distributed time-varying consistent formation system based on topology changes, and realize the movement of non-holonomic mobile robots in the form of predetermined formations under topology changes.
[0086] In some practical applications of specific target tracking, continuous monitoring and transportation, such as: robot exploration on the surface of alien planets, multi-mobile robot collaborative tasks, etc., the application ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More