

Multi-modal expandable interactive flexible robot skin
A robot and interactive technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems that the robot skin cannot give feedback to interactive objects, high power consumption, and unintuitive, so as to optimize the human-computer interaction process, improve space utilization, The effect of reducing manufacturing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described below in conjunction with the accompanying drawings.
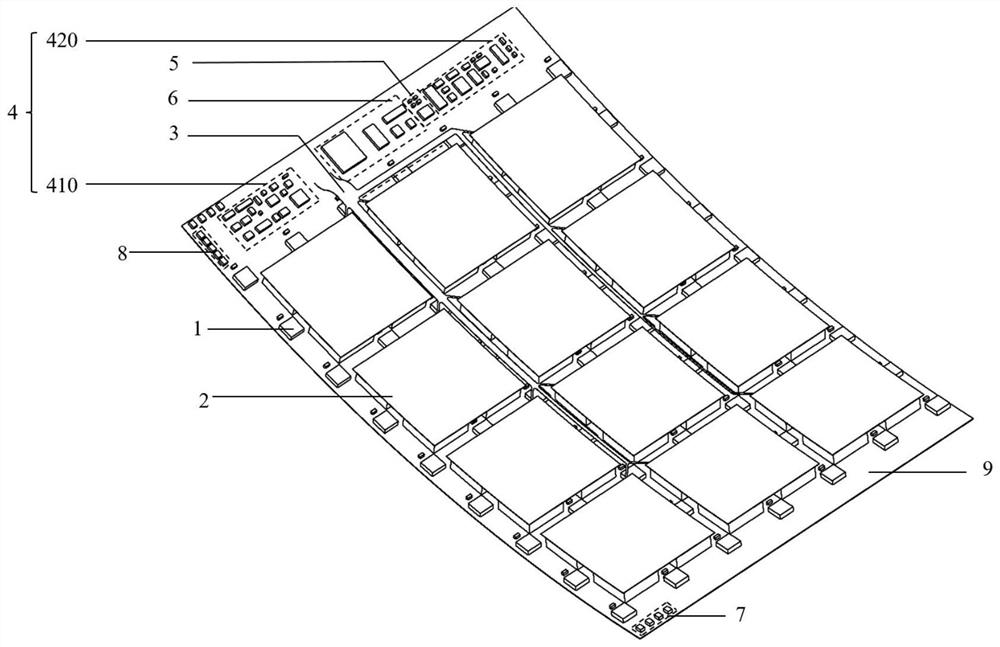
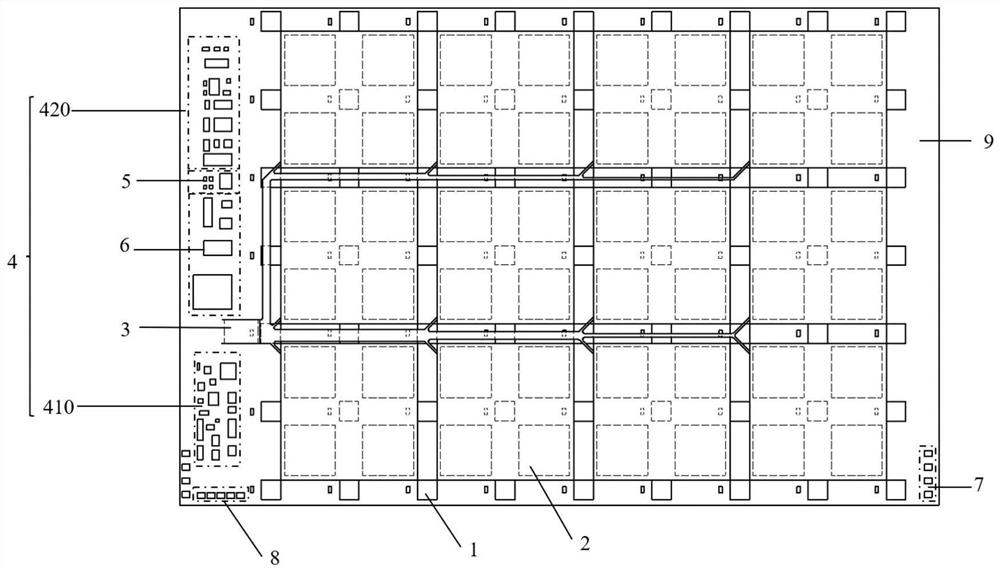
[0048] Such as figure 1 , figure 2 and Figure 5 As shown, the present invention includes a flexible sensing unit array, a flying wire connection unit 3, a data reading and processing unit 4, an address configuration unit 5, a micro control unit 6, a flexible robot skin expansion connection interface 7, and a flexible robot skin data output interface 8 and a flexible printed circuit board substrate 9;
[0049] The flexible sensing unit array, the flying wire connection unit 3, the data reading and processing unit 4, the address configuration unit 5, the micro control unit 6, the flexible robot skin expansion connection interface 7 and the flexible robot skin data output interface 8 are all fixedly installed on the flexible printing plate. On the circuit board substrate 9,
[0050] The flexible sensing unit array is connected to the data reading and processing unit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More