

Accurate detection method and system for dense plums picked by robot
A detection method and robot technology, applied in the research field of agricultural robots, can solve problems such as poor performance, limited technical resources of fruit picking robots, and increase the difficulty of detecting small and small objects, and achieve the effect of improving light weight and accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
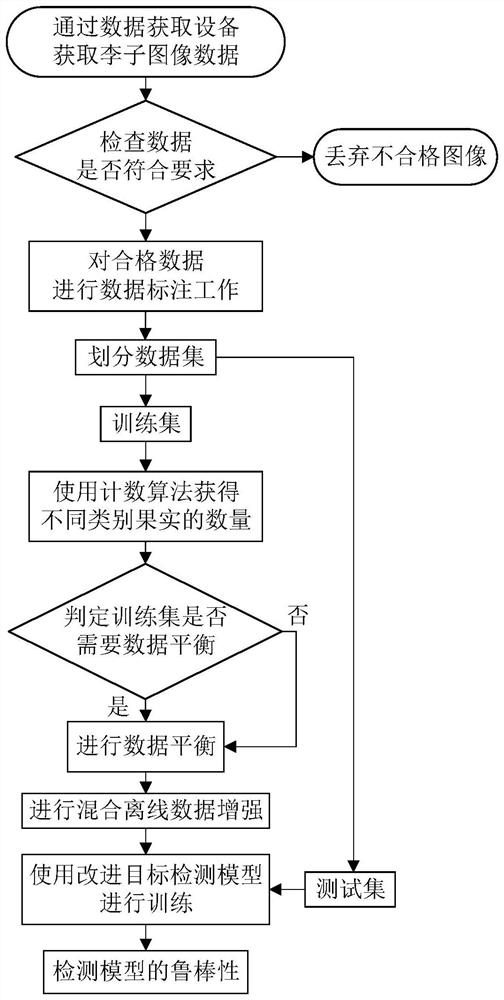
[0061] A method for precise detection of dense plums for robot picking, such as figure 1 shown, including the following steps:
[0062] Collect images of orchard fruits through image acquisition equipment;
[0063] Check and process the collected images to obtain target detection images that meet the requirements;
[0064] Use the data annotation tool to perform data annotation on the target detection image, and obtain annotated images with different maturity levels;
[0065] Divide the labeled image into the training set in proportion, and obtain the number of mature fruits and the number of immature fruits in the training set;
[0066] According to the fruit maturity ratio in the training set, it is judged whether to perform data balance processing, and a balanced training set is obtained after data balance processing;
[0067] Perform data enhancement processing on the balanced training set data set to obtain a data enhancement training set;
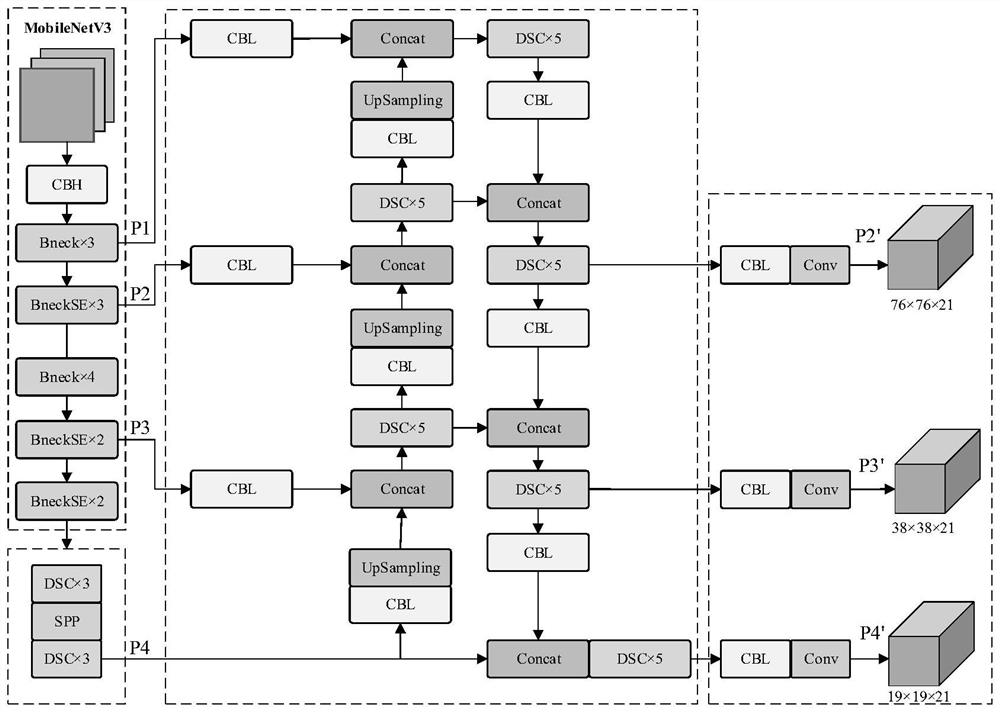
[0068] Improve the target ...
Embodiment 2
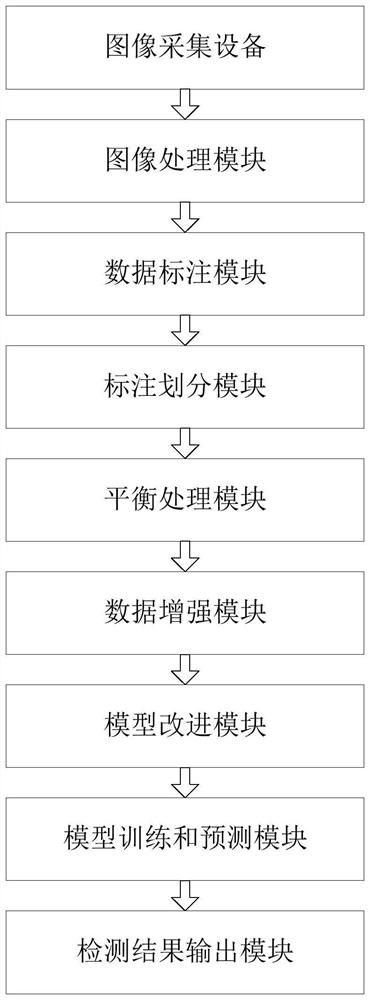
[0105] A dense plum detection system for robot picking, such as image 3 shown, including:
[0106] An image collection device for collecting images of orchard fruits;
[0107] The image processing module is used to check and process the collected images to obtain target detection images that meet the requirements;
[0108] The data labeling module is used to perform data labeling on the target detection image and obtain the labeling image;
[0109] A label division module is used to divide the labeled image into a training set and a test set in proportion to obtain the number of ripe fruits and the number of immature fruits in the training set;
[0110] The balance processing module performs data balance processing according to the fruit maturity ratio in the training set to obtain a balanced training set;
[0111] The data enhancement module performs data enhancement processing on the balanced training set data set to obtain a data enhancement training set;
[0112] The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More