Dynamic path planning method for improving particle swarm optimization
A technology for improving particle swarm and dynamic path, applied in two-dimensional position/channel control, etc., can solve problems such as uneven generated path, poor real-time path, and many turning angles, and achieve the effect of improving smoothness and shortening length
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0060] The specific implementation, features and effects of an improved particle swarm optimization algorithm-based dynamic path planning proposed by the present invention will be described in detail below in conjunction with the accompanying drawings and preferred embodiments.
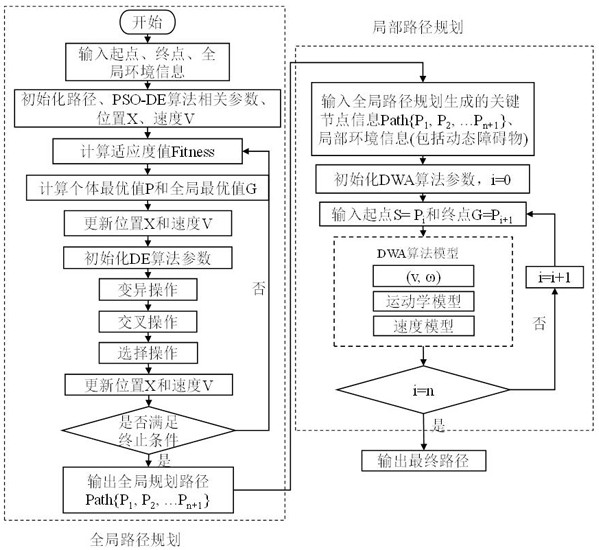
[0061] see figure 1 , a kind of dynamic path planning method of improved particle swarm algorithm of the present invention, wherein: the method comprises the following steps:
[0062] Step 1. Use the improved particle swarm optimization algorithm to generate the global path, and extract the key nodes {P 0 ,P 1 ,…P n+1} as the local target point, that is, the starting point of each local path planning is S{S 1 ,S 2 ,…S n}={P 0 ,P 1 ,…P n}; The local target point of each local path planning is G{G 1 ,G 2 ,...G n}={P 1 ,P 2 ,…P n+1}, divide the path into {S 1 G 1 ,S 2 G 2 ,…S n G n} consists of n sections of local paths;
[0063] The specific steps of the improved particle swarm opti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More