

Human body behavior recognition method in man-machine cooperation assembly scene
A human-machine collaboration and recognition method technology, applied in the field of human behavior recognition, can solve the problems of low behavior recognition accuracy, easy recognition errors, and low assembly efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
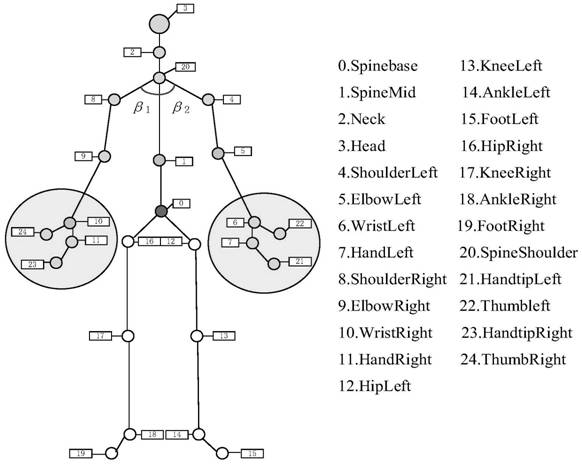
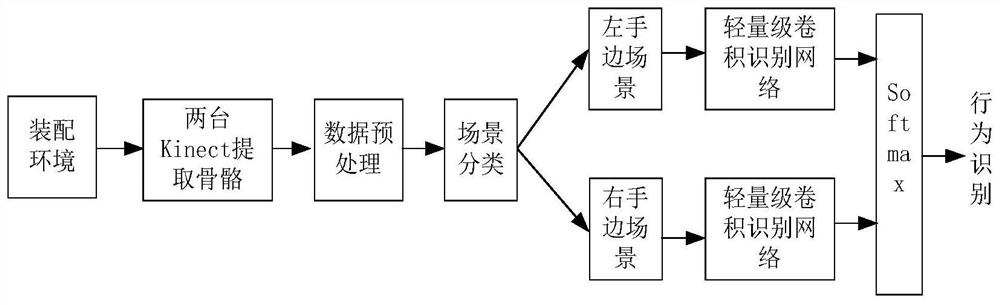
[0035] Such as figure 1 As shown, a human-machine collaborative assembly scene human behavior recognition method, which includes,
[0036] Step 1: Set up two somatosensory devices, the angle between the two somatosensory devices is θ, and obtain the joint point coordinate flow of the skeletal joints under human behavior from the somatosensory devices;
[0037] Step 2: Screen the joint point coordinate stream with complete skeletal joints, and locate the start position and end position of the action according to the motion event segmentation algorithm to obtain the joint point information;
[0038] Step 3, the joint point information is resampled according to the included angle θ to obtain the joint point coordinates;
[0039] Step 4: Use the coordinates of spinebase (joint 0) as the origin of the local coordinates to normalize the coordinates of other joint points, and then smooth to obtain a sequence of bones that constitute an action.
[0040] Step 5: Simplify the vectors ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More