

Surgical robot navigation board and navigation method
A surgical robot and navigation board technology, which is used in surgical navigation systems, surgical robots, surgery, etc., can solve the problems of inability to locate and correct the central area of the navigation board, unstable operation of the surgical robot system, and inability to track the target in time for living targets. High degree of automation, low computing power requirements, and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] Below, in conjunction with accompanying drawing and specific embodiment, the present invention is further described:
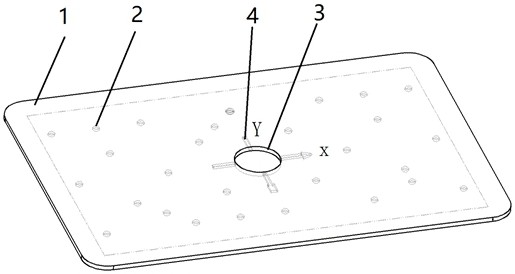
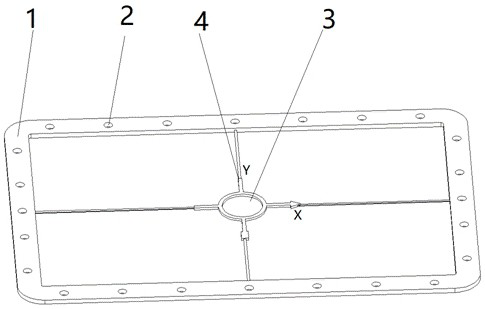
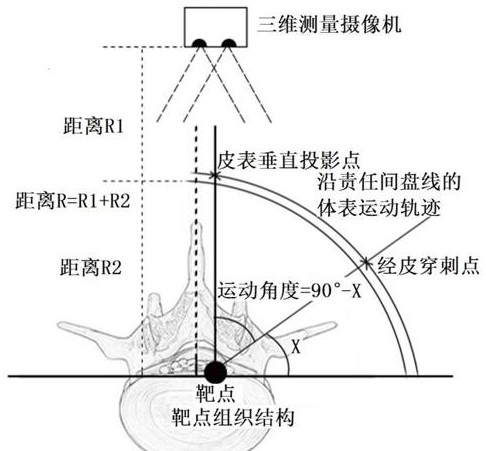
[0047] The invention discloses a navigation board for a surgical robot, comprising a navigation board body, an outer frame 1 is arranged around the navigation board body, a plurality of correction targets 2 are distributed on the navigation board body, and a center of the navigation board body is opened There is a central correction target. And discloses a method of using the navigation board as a guide, calibrating and tracking a surgical robot. By using the navigation board as an intermediate bridge, the stable tissue structure image obtained by intraoperative X-ray and the preoperative MRI image are matched and unified with the robot. The coordinate system is used to guide the robot for positioning, and the robot vision system is guided through the navigation board to complete the tracking and positioning in the operation. The surgical robot navigat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More