

Unmanned aerial vehicle obstacle avoidance method and device, unmanned aerial vehicle and storage medium
A drone and obstacle avoidance technology, applied in three-dimensional position/course control, vehicle position/route/height control, instruments, etc., can solve the problems of poor forward obstacle detection ability and low accuracy of safe flight, etc. To achieve the effect of solving poor detection ability, improving detection ability and ensuring operation safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention. In addition, it should be noted that, for the convenience of description, only some structures related to the present invention are shown in the drawings but not all structures.
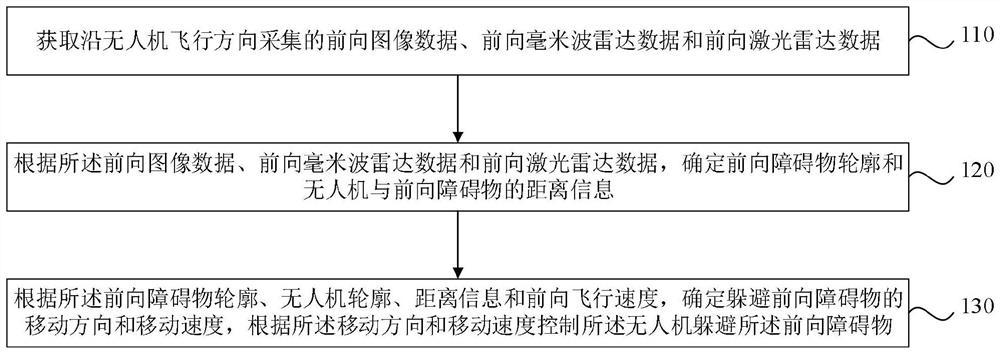
[0033] figure 1 It is a flow chart of a UAV obstacle avoidance method provided by the embodiment of the present invention. This embodiment can be applied to the power line inspection work scene. The method can be executed by the UAV obstacle avoidance device. The device can have hardware and and / or implemented in software and typically deployed in UAVs. Such as figure 1 As shown, the method includes:
[0034] Step 110, acquiring forward image data, forward millimeter wave radar data and forward laser radar data...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More