

Gripped target detection algorithm based on edge extraction and cavity convolution
A target detection algorithm and edge extraction technology, applied in computing, computer components, image enhancement, etc., can solve the problems of lack of multi-scale information capture and low precision, so as to improve convergence ability and precision, improve detection speed, and improve experience effect of ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
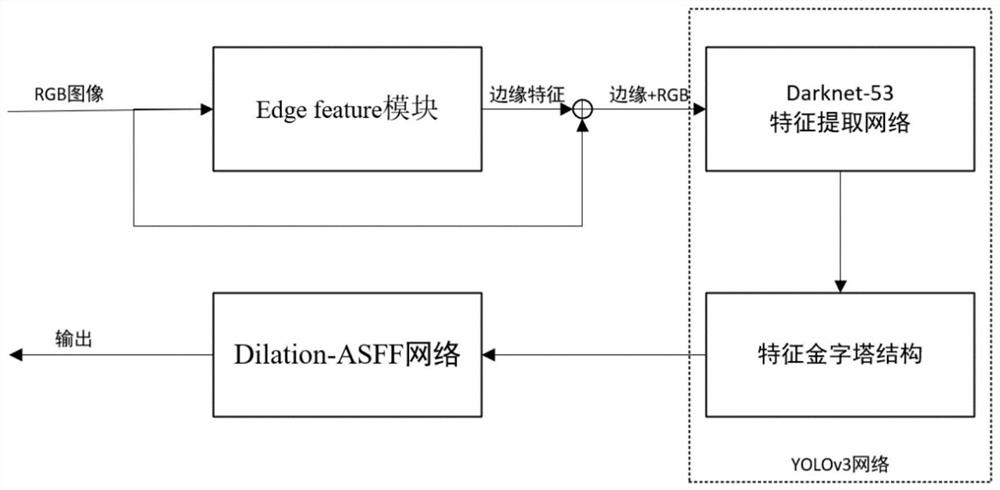
[0041] Such as figure 1 As shown, this embodiment discloses a capture target detection algorithm based on edge extraction and atrous convolution, including an Edge feature module, a Darknet-53 feature extraction module, a feature pyramid structure, and a Dilation-ASFF network. The specific steps are:
[0042] Step 1, image collection: collect the RGB image of the target, and use the Edge feature module to extract the edge information of the image to form four-channel feature information;
[0043] The Edge feature module is based on the Canny operator, which uses image edge information as the prior information of the YOLOv3 network. YOLOv3 uses an upsampling and fusion algorithm similar to the FPN network, and builds a feature pyr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More