Remote hierarchical management and control method and system for industrial robot
A technology of industrial robots and management and control systems, applied in the field of remote layered management and control methods and systems of industrial robots, can solve the problems of high complexity and cost of development, non-reusable and non-reconfigurable development environments, etc., and achieve good people Computer interaction capability, reduced coupling degree of system design, and high work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
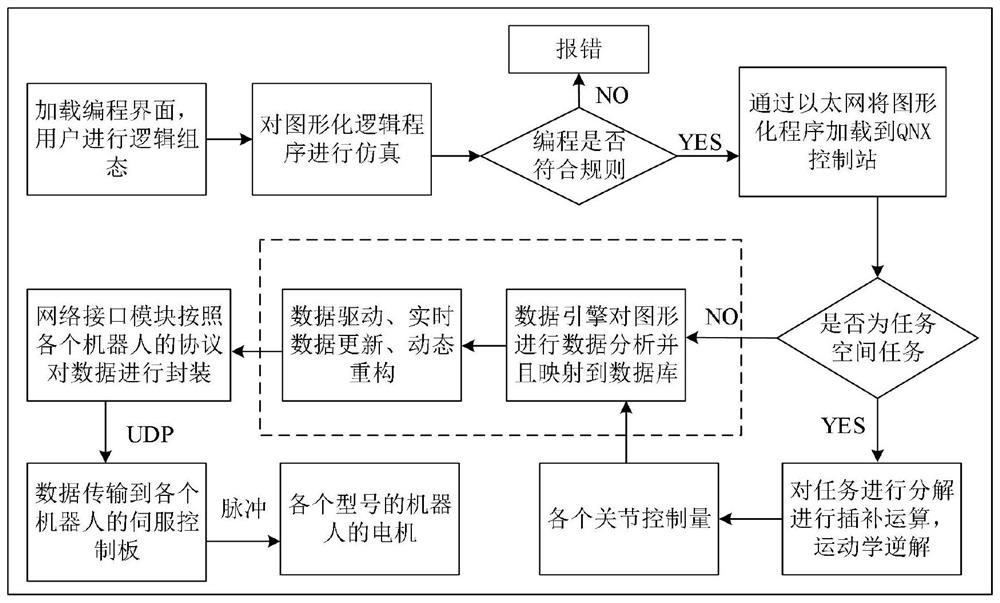
[0036]Such as figure 2 As shown, this embodiment provides a remote layered control method for industrial robots, including:
[0037] S1. Load the graphical editing interface through the application layer for users to perform logic configuration programming in an offline state; get the graphical program and analyze it, compile and simulate it, check whether the program complies with the rules, and if so, load it to the motion through Ethernet In the planning layer, if not, report an error and provide program error checking;
[0038] S2. After the motion planning layer loads the graphical program, determine which one of the graphical program's task is an IO command, a query task, or a spatial task;
[0039] If it is an IO command or a query task, directly analyze the data of the graphical program and map it to the database;
[0040] If it is a space task, call the calculation thread, decompose the space task, perform joint interpolation calculation, kinematic inverse solution...
Embodiment 2
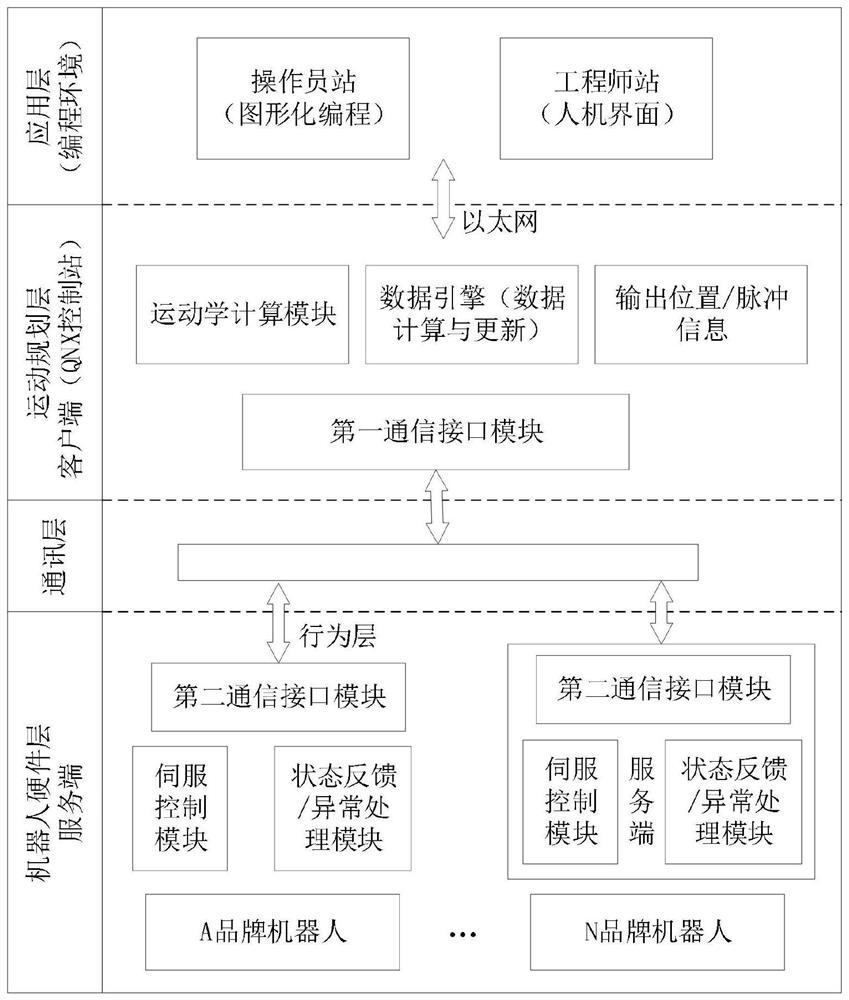
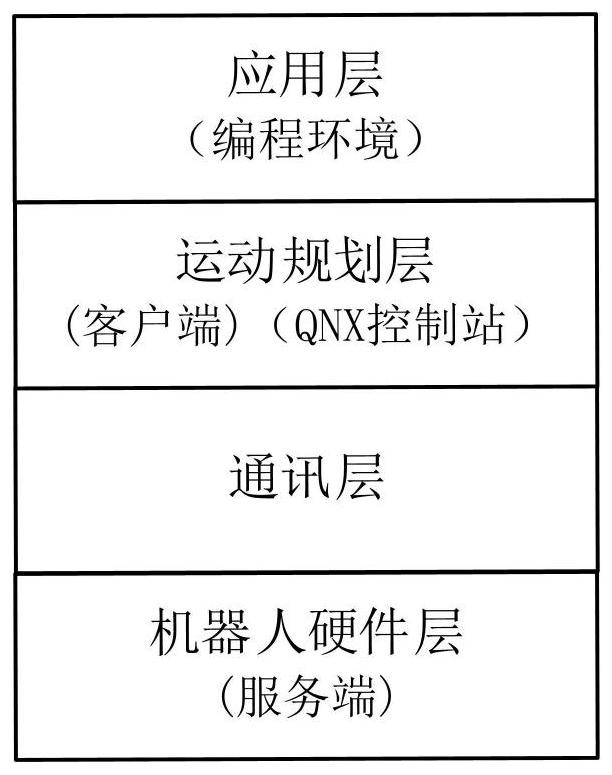
[0061] Such as image 3 As shown, in this embodiment, a remote hierarchical management and control system for industrial robots is provided. The remote management and control system for robots is implemented in a hierarchical structure, including:
[0062] The application layer is used to load a graphical editing interface for users to perform logic configuration programming in an offline state; obtain and analyze the graphical program, compile and simulate it, check whether the program complies with the rules, and if so, send it via Ethernet. If not, report an error and provide program error checking;
[0063] The motion planning layer is used to load the graphical program through the Ethernet, and judge whether the task of the graphical program is an IO command, query task, or space task; if it is an IO command or a query task, it directly performs data processing on the graphical program Analyze and map to the database; if it is a space task, call the calculation thread, d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com