Underwater wall-climbing cleaning robot full traversal path planning method and system
A technology for cleaning robots and traversing paths, which is applied in the field of full-traversal path planning methods and systems for underwater wall-climbing cleaning robots, which can solve problems such as repeated cleaning and large total path lengths, reduce power consumption and working time, and improve work efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0039] The present invention adopts an underwater wall-climbing cleaning robot that has both floating and wall-climbing functions. The underwater environment is different from the land plane and belongs to a three-dimensional interval. Float straight up and over obstacles.
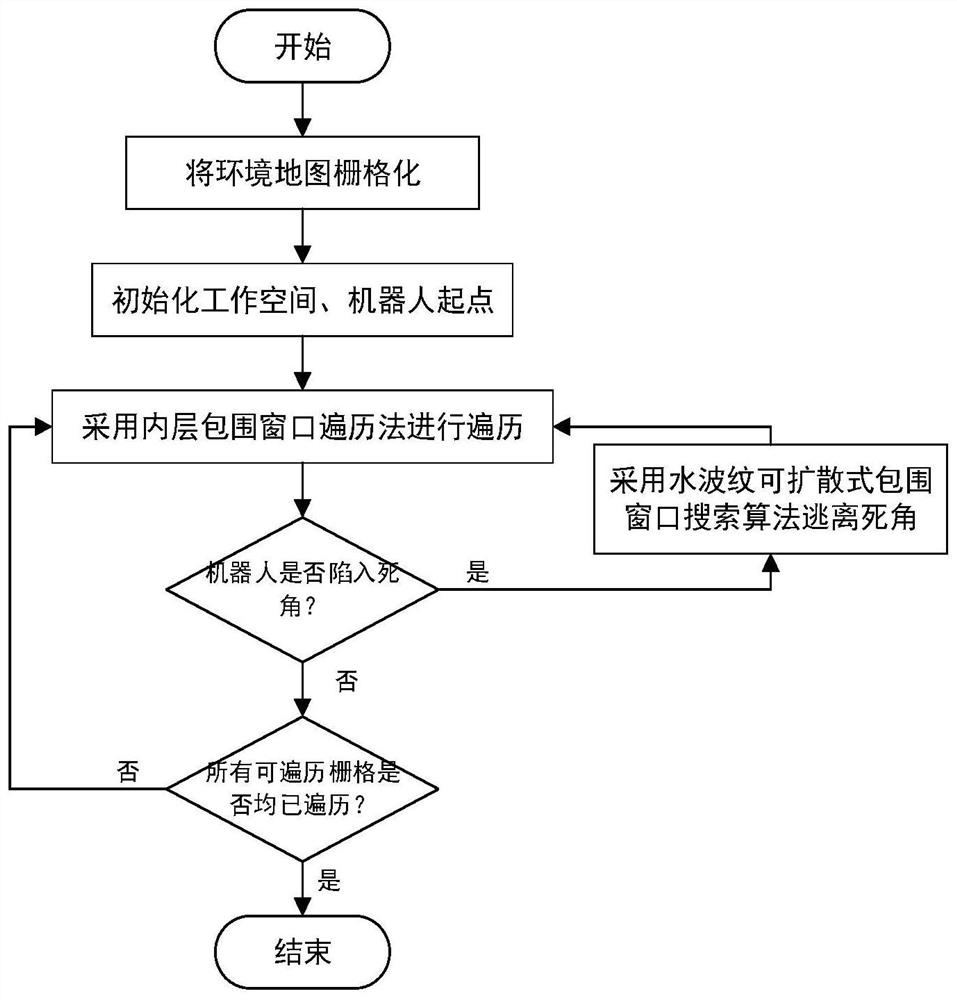
[0040] Such as figure 1 As shown, this embodiment provides a method for planning a full traversal path for an underwater wall-climbing cleaning robot. This embodiment uses the method applied to a server for illustration. It can be understood that, in this embodiment, the method includes the following steps :
[0041] Step S1: Establish an environment model map according to the information fed back by the sensor;
[0042] Step S2: Carrying out environmental modeling based on the environmental model map using the grid map method;
[0043] Step S3: Based on the established grid map model, use the inner layer enclosing window traversal method to traverse;
[0044] Step S4: When the robot falls into a dead ...
Embodiment 2
[0081] This embodiment provides a full traversal path planning system for an underwater wall-climbing cleaning robot, including:
[0082] The environment model map establishment module is configured to establish the environment model map according to the information fed back by the sensor;
[0083] The grid map model building module is configured to use the grid map method for environmental modeling based on the environmental model map;
[0084] The grid traversal module is configured to perform traversal based on the established grid map model by using the inner layer enclosing window traversal method;
[0085] The grid escaping module is configured to use the water ripple diffuseable enclosing window search method to find the escape grid when the robot is stuck in a dead corner;
[0086] The traversal completion module is configured to judge whether all traversable grids have been traversed, and when all the traversable grids in the grid map model have been traversed, the t...
Embodiment 3
[0091] This embodiment provides a computer-readable storage medium, on which a computer program is stored, and when the program is executed by a processor, the full traversal path planning method of an underwater wall-climbing cleaning robot as described in the first embodiment is implemented. A step of.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More