

Puncture actuator of cooperative medical robot and puncture system and method thereof
A collaborative medical and robotic technology, applied in surgical robots, puncture needles, medical science, etc., can solve the problems of strong experience dependence and low puncture accuracy, so as to ensure the accuracy of puncture, reduce the dependence on doctors' experience, and facilitate the realization of Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
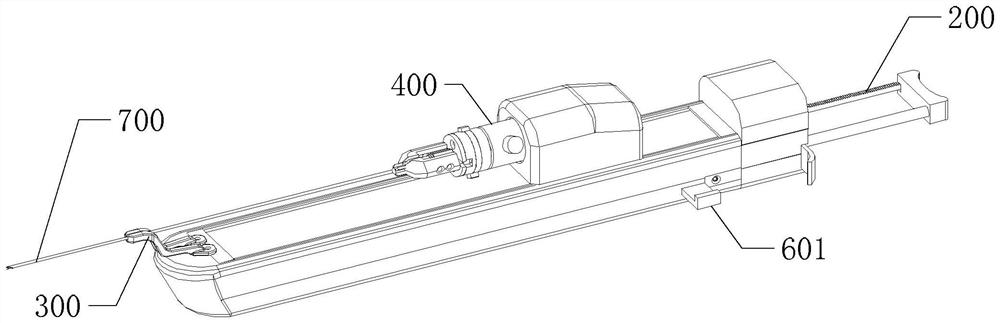
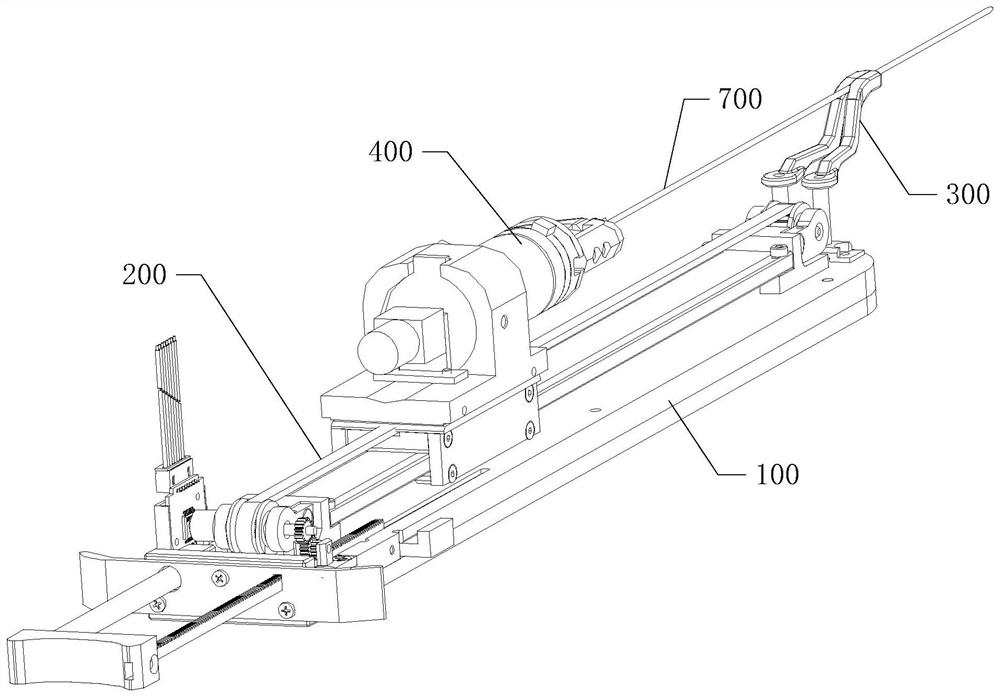
[0039] Specific embodiment one: the following combination image 3 Describing this embodiment, the puncture actuator of the collaborative medical robot described in this embodiment includes a base plate 100, a manual feeding mechanism 200, and is characterized in that it also includes an openable and closable guide mechanism 300 and a needle twisting mechanism 400;
[0040] The openable and closable guide mechanism 300 is disposed at one end of the base plate 100 for guiding the puncture needle 700;
[0041] The manual feeding mechanism 200 is arranged above the base plate 100 and is used to control the feeding depth and speed of the puncture needle 700;
[0042] The needle twisting mechanism 400 is arranged above the manual feeding mechanism 200, and the needle twisting mechanism 400 is used to sense the resistance of the puncture needle 700, and adjust the puncture according to the resistance, the feeding depth and the feeding speed of the puncturing needle 700. The twistin...
specific Embodiment approach 2
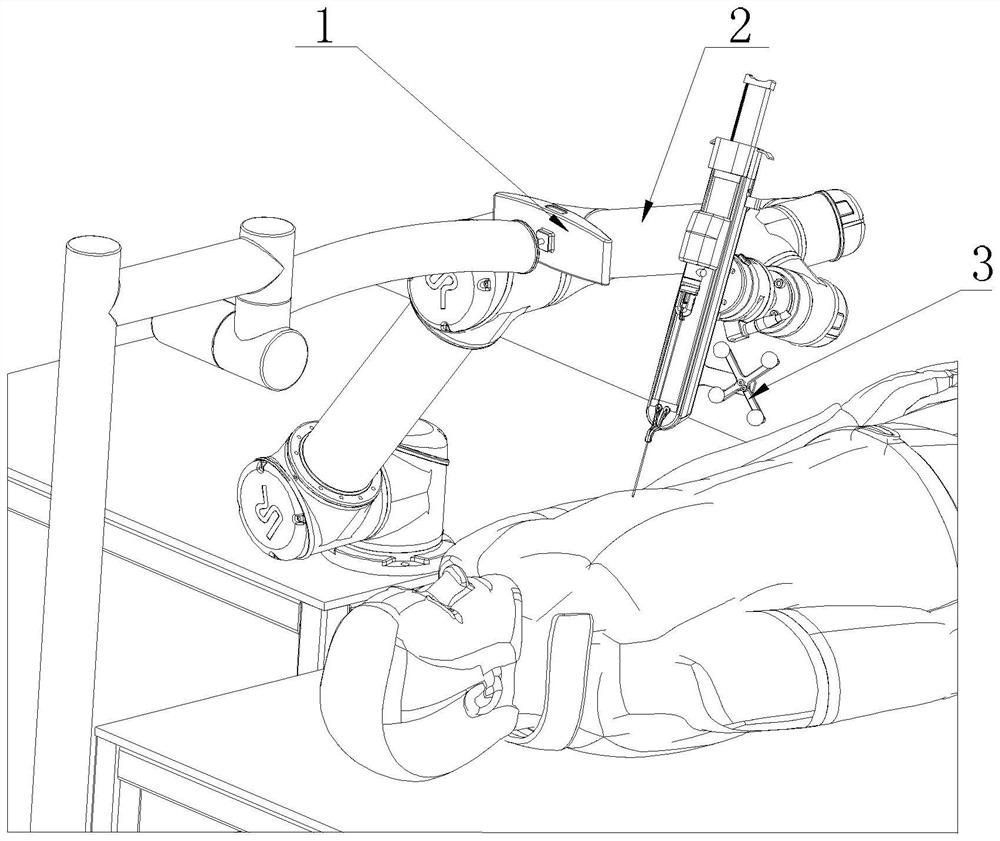
[0076] Specific embodiment two: the following combination figure 1 and Figure 5 This embodiment will be described. This embodiment adopts the puncture system implemented by the puncture actuator of the collaborative medical robot described in the specific embodiment 1. The puncture system further includes an optical navigation system 1, a manipulator 2, a calibration target ball 3 and a host computer;
[0077] The puncture actuator is fixed on the manipulator 2, and the calibration target ball 3 is set on the puncture actuator;
[0078] The optical navigation system 1 determines the position of the puncture actuator on the manipulator 2 by collecting the position and attitude of the calibration target ball 3;
[0079] The upper computer is used to determine the feeding depth and speed of the puncture needle 700 according to the rotational speed and the number of turns of the main drive gear 202-1 of the transmission mechanism 202 collected by the encoder 500, and then accord...
specific Embodiment approach 3
[0082] Embodiment 3: This embodiment adopts the puncture method implemented by the puncture system described in Embodiment 2, and the method includes the following steps:
[0083] S1. The optical navigation system 1 determines the current position of the puncture actuator on the manipulator 2 by collecting the position and attitude of the calibration target ball 3;
[0084] S2. According to the current position of the puncture actuator, the upper computer drives the puncture actuator to a preset position through the manipulator 2, and locks the manipulator 2;
[0085] S3, push the puncture needle 700 to move toward the lesion position by the manual feeding mechanism 200,
[0086] During the movement of the puncture needle 700 to the lesion position, the upper computer adjusts the twisting speed and the speed of the puncture needle 700 through the needle twisting mechanism 400 according to the rotational speed and the number of turns collected by the encoder 500 and the resista...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More