

Expandable and reconfigurable multi-level sensing flexible robot skin
A robotic and flexible technology, applied in manipulators, manufacturing tools, etc., can solve the problems of high power consumption, limited development of human-computer interaction, inability to accurately locate the contact position and contact force, and achieve large detection distance and reduced spatial resolution. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described below with reference to the accompanying drawings.
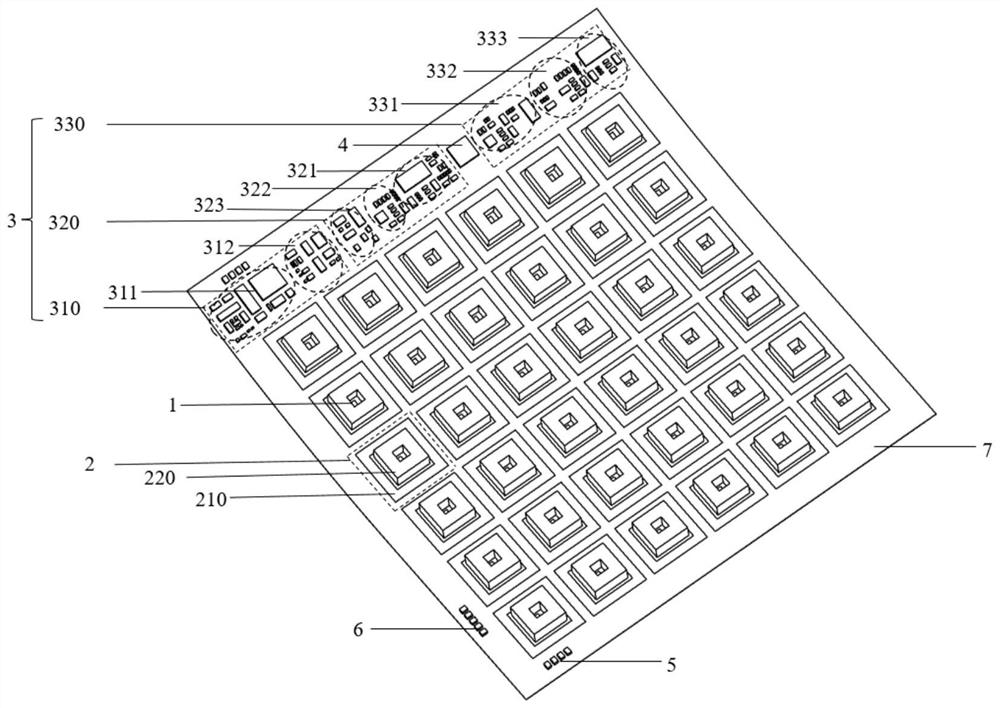
[0048] like figure 1 As shown, the present invention includes a flexible sensing light-emitting array, a data reading and processing unit 3, a micro-control unit 4, a flexible robot skin expansion connection interface 5, a flexible robot skin data output interface 6 and a flexible printed circuit board substrate 7; flexible sensing light-emitting The array, data reading and processing unit 3, micro-control unit 4, flexible robot skin expansion connection interface 5 and flexible robot skin data output interface 6 are all laid on the flexible printed circuit board substrate 7, and the integrated design and integration of flexible printed circuit technology are adopted. Heterogeneous integration. The flexible sensing light-emitting array is connected with the data reading and processing unit 3 and the micro-control unit 4, and the micro-control unit 4 is connected with th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More