

Driving and grading mechanism for all-terrain mobile robot
A mobile robot, all-terrain technology, applied in the field of mobile robots, can solve the problems of no belt tensioning mechanism, low motor output efficiency, difficult braking, etc., to reduce installation accuracy requirements and processing costs, reduce battery energy consumption, The effect of reducing the operating factor
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the technical means of the present invention, creative features, to achieve the purpose and efficacy easy to understand, the following is further elaborated in the present invention.
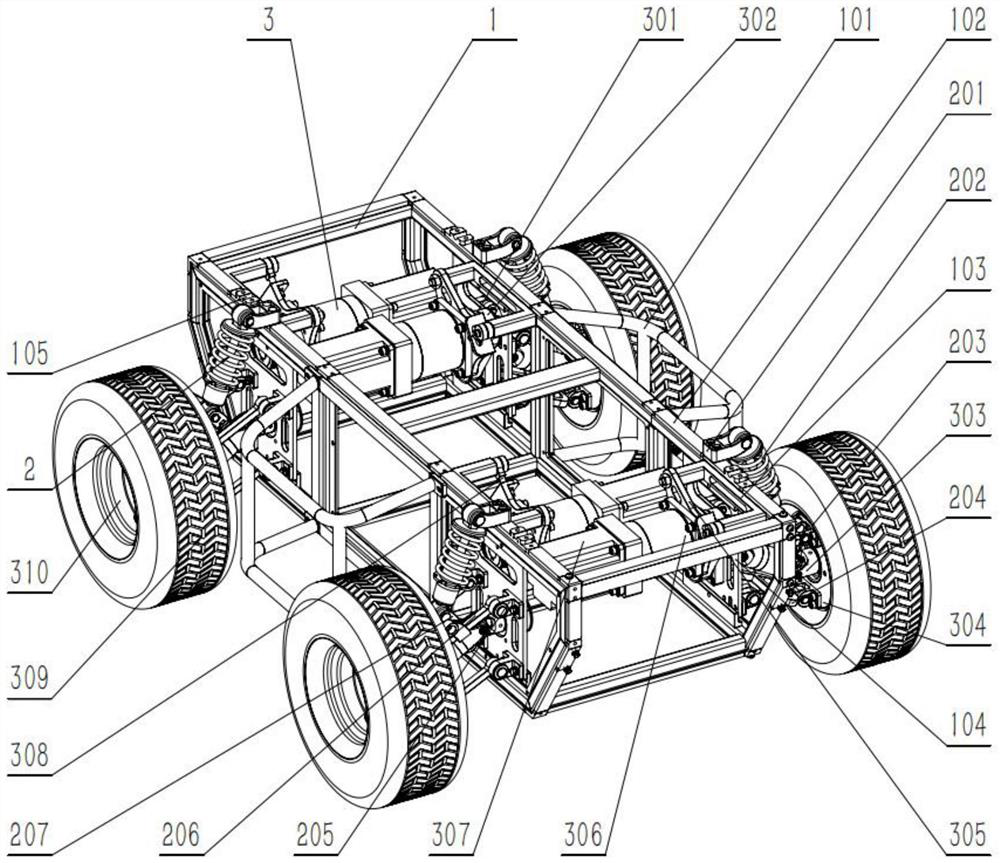
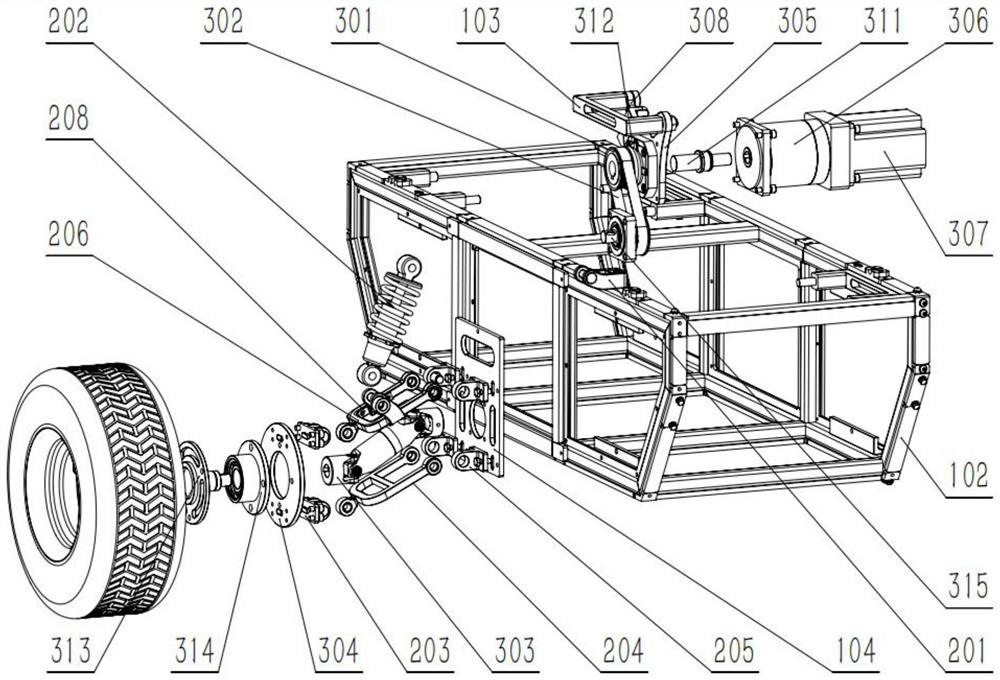
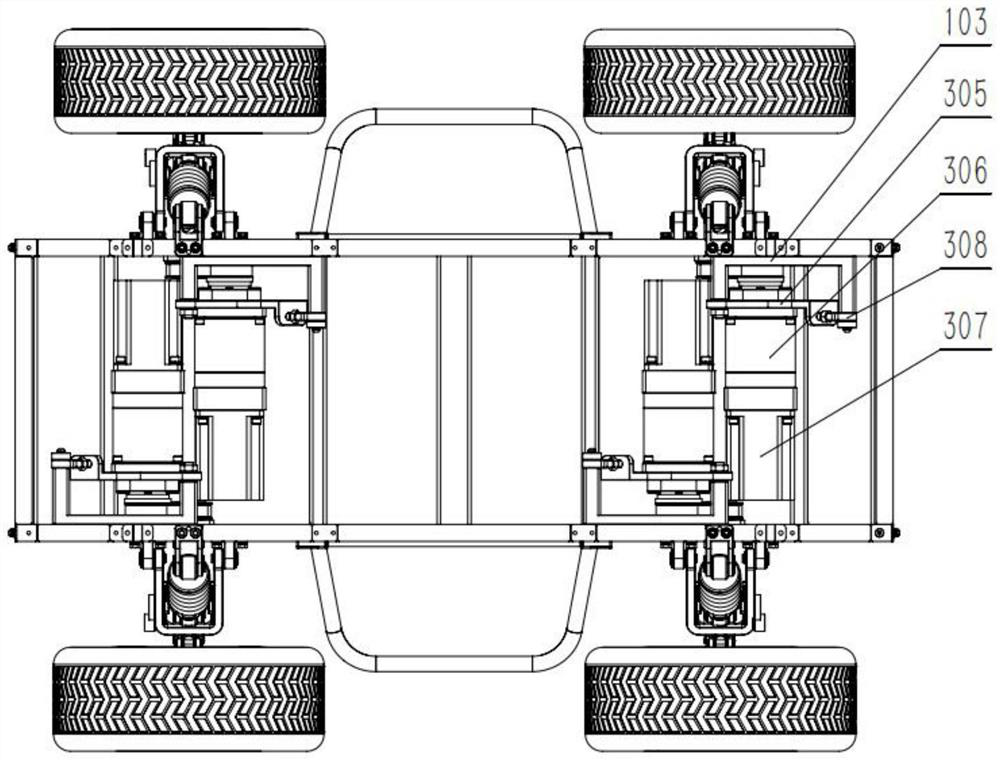
[0029] as Figures 1 through 6 As shown, a drive gearing mechanism for all-terrain mobile robots, including:
[0030] Truss car base assembly 1;
[0031] Gear-type drive unit 3, installed on the truss vehicle base assembly 1, which comprises four sets of power modules arranged and power output using staggered parallel suspension, according to the actual needs to complete the mobile robot driving state and neutral taxiing state switching;
[0032] Double beepton damping unit 2, connected between each set of power modules and the truss car base assembly 1, to enhance the body strength and stability of the mobile robot.
[0033] Specifically, the present invention realizes the separation of the wheel module and the power module by driving the gearing mechanism, reduces the impact...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More