Passive synthetic aperture-based multi-unmanned aerial vehicle cooperative direct positioning method
A multi-drone, synthetic aperture technology, applied in positioning, radio wave measurement systems, instruments, etc., can solve the problems of information loss, affecting positioning performance, increasing positioning error and processing time, etc., to improve positioning accuracy and improve Discrimination ability, effect of avoiding data association problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments:
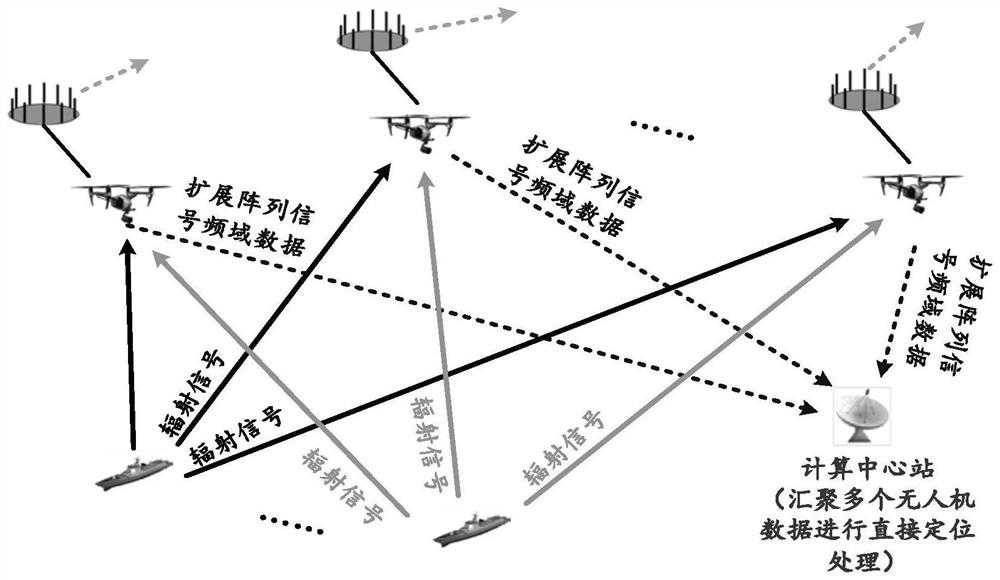
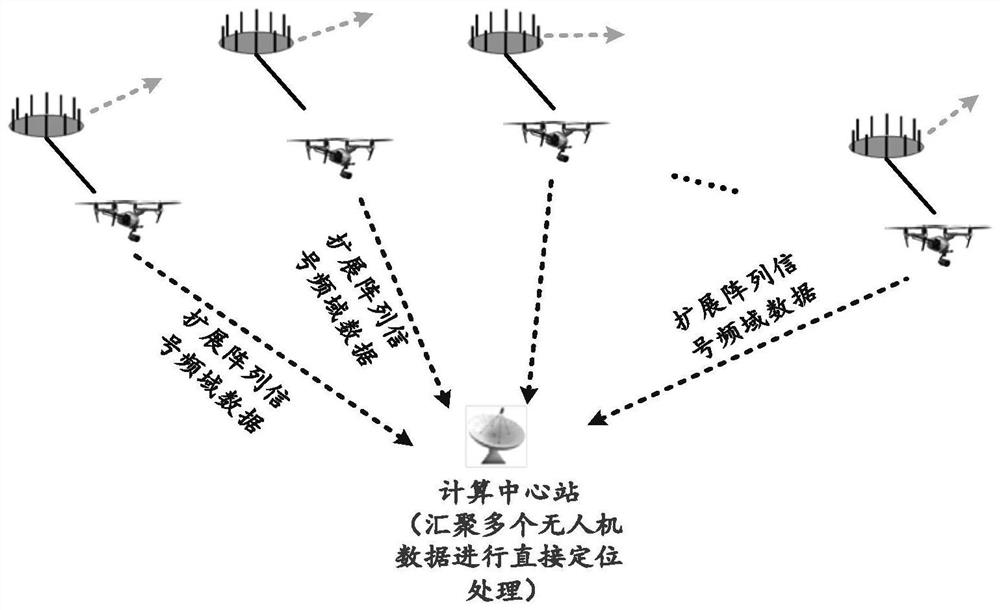
[0062] like figure 1 As shown in the figure, a passive synthetic aperture-based cooperative direct positioning method for multiple UAVs disclosed in the present invention requires an array antenna to be installed on each UAV, and each UAV transmits the observation frequency domain data to the central station. The subspace orthogonality of the signal at each frequency point directly (jointly) estimates the position parameters of multiple targets in the signal data domain.
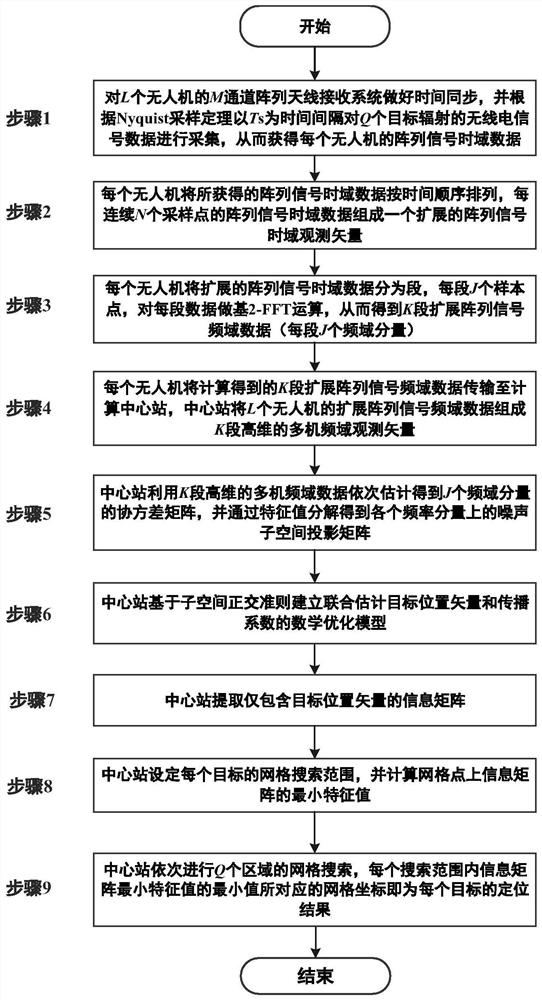
[0063] like figure 2 As shown in the figure, a method for cooperative direct positioning of multiple UAVs based on passive synthetic aperture includes the following steps:
[0064] Step 1: Do time synchronization for the M-channel array antenna receiving systems of L UAVs, and according to the Nyquist sampling theorem to T s The radio signal data radiated by Q targets is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com