Underwater robot vertical plane motion control method based on parameter identification
An underwater robot and motion control technology, which is applied in non-electric variable control, two-dimensional position/channel control, underwater operation equipment, etc., can solve the problem of reducing the control accuracy and low calculation accuracy of the variable structure underwater robot control method. problem, to achieve the effect of good algorithm robustness and environmental adaptability, low economic cost, and reduced design cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described in detail below with reference to the accompanying drawings and embodiments.
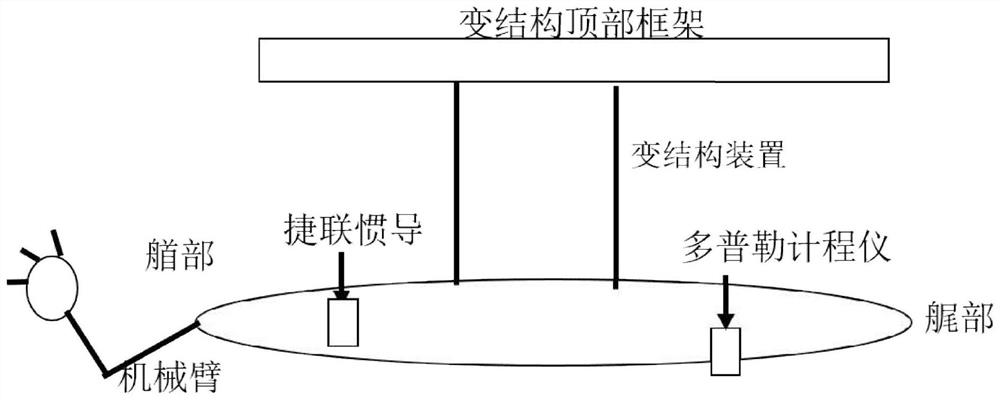
[0034] The whole system consists of variable structure underwater robot, Doppler log, strapdown inertial navigation, robotic arm and other equipment carried by the variable structure underwater robot. Among them, the variable structure underwater robot is a submersible equipped with a Doppler log, strapdown inertial navigation, and a mechanical arm. The Doppler log and strapdown inertial navigation are the navigation sensors of the variable structure underwater robot. The function of the log is to measure the motion speed of the variable structure underwater robot relative to the bottom, which includes forward speed, vertical speed, etc.; the function of the strapdown inertial navigation is to measure the attitude angle, angular velocity rate, linear velocity Velocity information such as acceleration, which includes heading angle, pitch angle, r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com