Lower limb exoskeleton robot control system based on divergent motion component
An exoskeleton robot and motion component technology, applied in the field of medical equipment and rehabilitation aids, can solve the problems of difficulty in obtaining expected results, and achieve the effect of improving stability and system stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be described in detail below with reference to specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that, for those skilled in the art, several changes and improvements can be made without departing from the inventive concept. These all belong to the protection scope of the present invention.
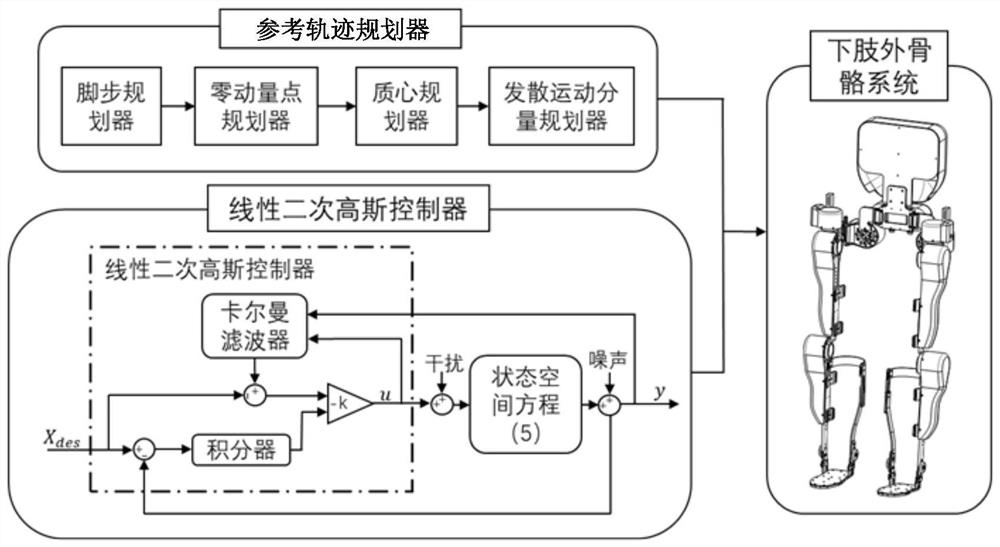
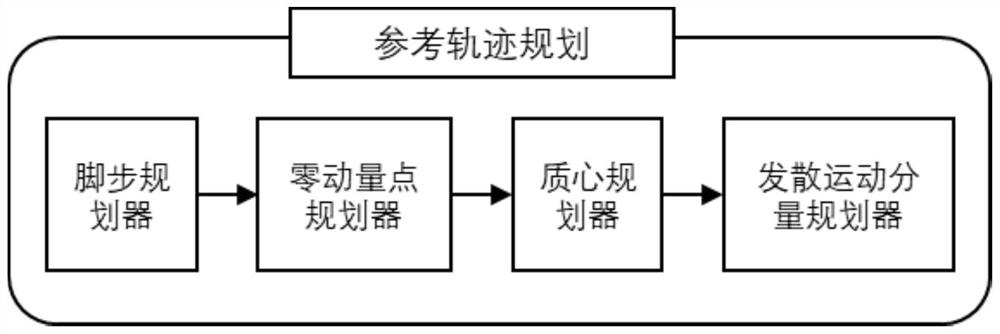
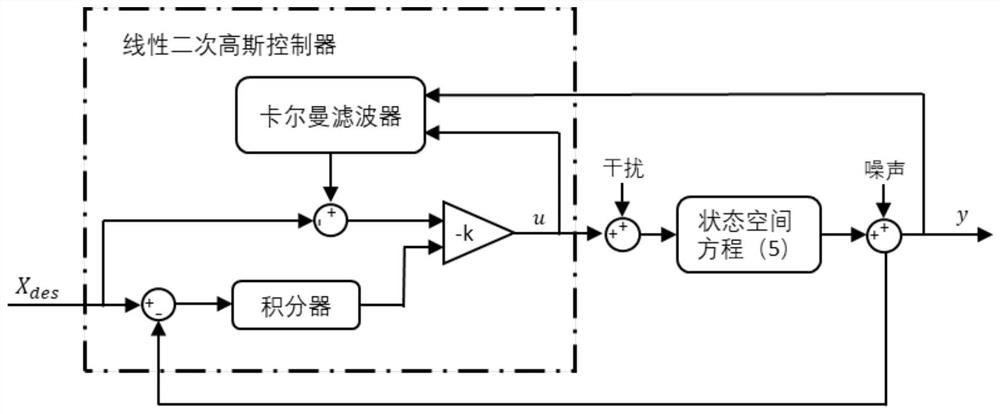
[0043] The present invention provides a lower limb exoskeleton robot control system based on divergent motion components, including a lower limb exoskeleton robot reference trajectory planner and a linear quadratic Gaussian controller. The reference trajectory planner uses the linear inverted pendulum model to approximate the dynamics of the lower limb exoskeleton robot, and uses the concept of divergent motion components to express the overall dynamic model of the robot as a state space system, which simplifies...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



