

Underwater high-irradiation-resistant mechanical arm joint structure
A technology of robotic arms and joints is applied in the field of underwater high-irradiation-resistant robotic arm joint structures, which can solve the problems of high-irradiation resistance and underwater sealing of multi-joint robotic arms, and achieve the effects of good sealing and good sealing effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments.
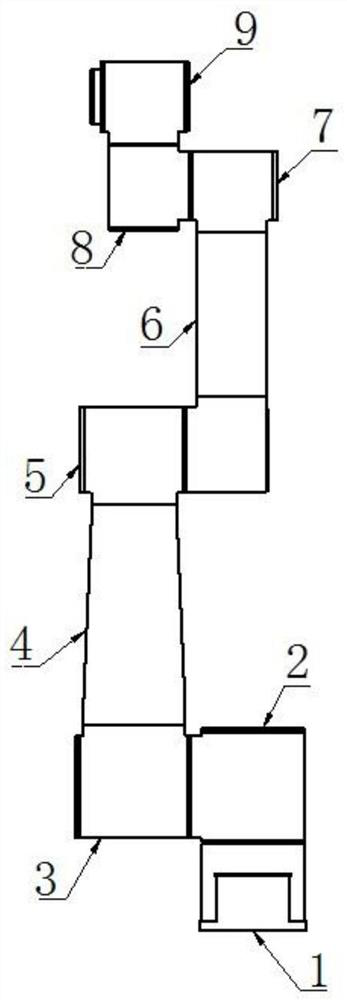
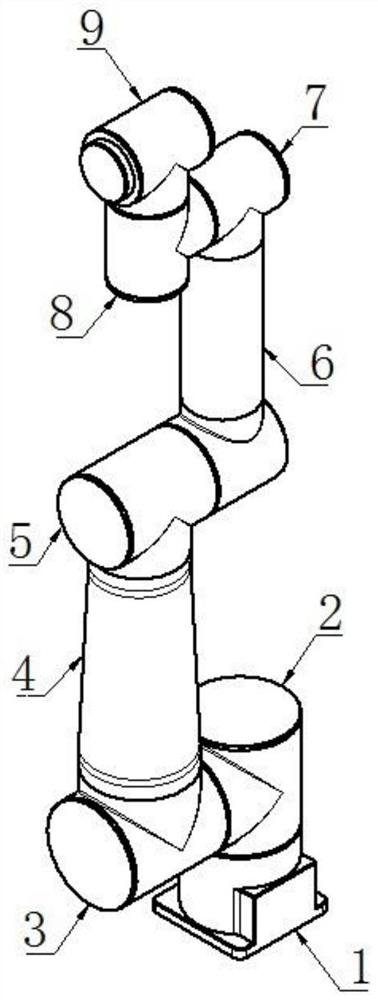
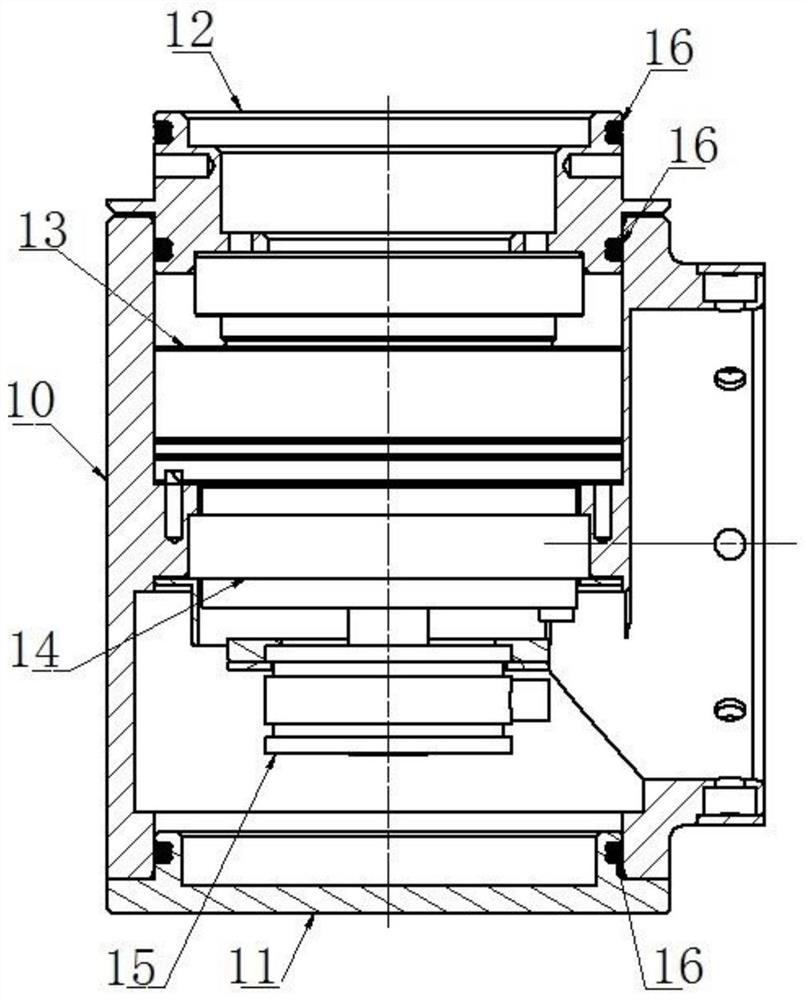
[0020] In the underwater high-irradiation-resistant manipulator structure provided by the present invention, compared with a general multi-joint manipulator, the joints of the manipulator adopt an irradiation-resistant design, which removes unnecessary sensors and replaces the sensors that must be retained with Radiation-resistant type, and rationalize the position of electronic components, so that the radiation-resistant requirements of the manipulator body can be met. At the same time, the joints of the robotic arm are designed to be waterproof, and a single joint can be sealed with only three sealing rings.
[0021] Compared with the general multi-joint manipulator, the present invention adopts the radiation-resistant design for the joints of the manipulator, removes unnecessary sensors, replaces the sensors that must be retained wit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More