

Path planning method of autonomous underwater robot based on multi-target improved particle swarm optimization
An underwater robot and particle swarm algorithm technology, applied in the direction of height or depth control, can solve the problems of long planning time, slow convergence speed, falling into local optimum, etc., to increase diversity, accelerate algorithm convergence, and avoid large angle changes Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and embodiments.
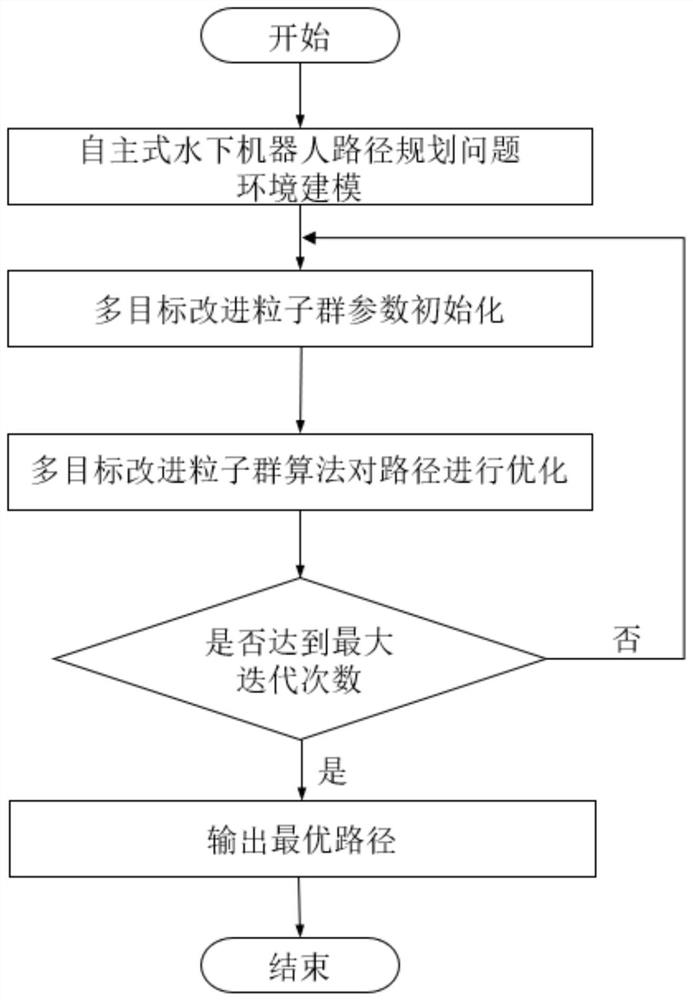
[0052] like figure 1 As shown, a path planning method for an autonomous underwater robot based on a multi-objective improved particle swarm algorithm of the present invention includes the following steps:
[0053] Step 1: Environment modeling for autonomous underwater robot path planning problem
[0054](1) Environmental modeling of path planning problems
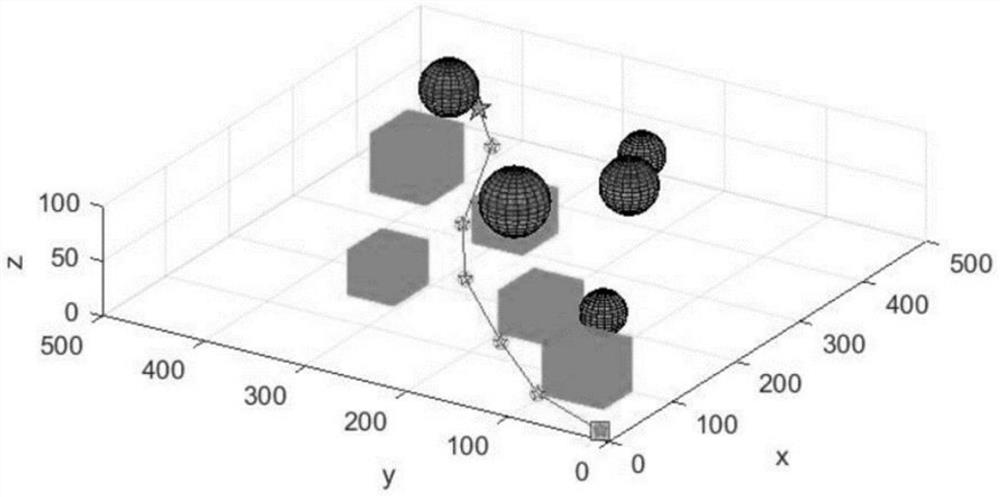
[0055] The environment for path planning is set to three-dimensional space, and the global coordinate system O-XYZ of the environment map is established; obstacles are represented by regular balls and cuboids, P 0 As the starting point of underwater robots, P N is the target point of the underwater robot; the path of the underwater robot can be represented in the three-dimensional environm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More