

Multi-vehicle-type collaborative sorting and scheduling method based on behavior dependency graph
A scheduling method, a technology that relies on graphs, applied in knowledge-based models of computer systems, computational models, data processing applications, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make those skilled in the art better understand the technical solutions of the present invention, the present invention will be further described in detail below with reference to the accompanying drawings.
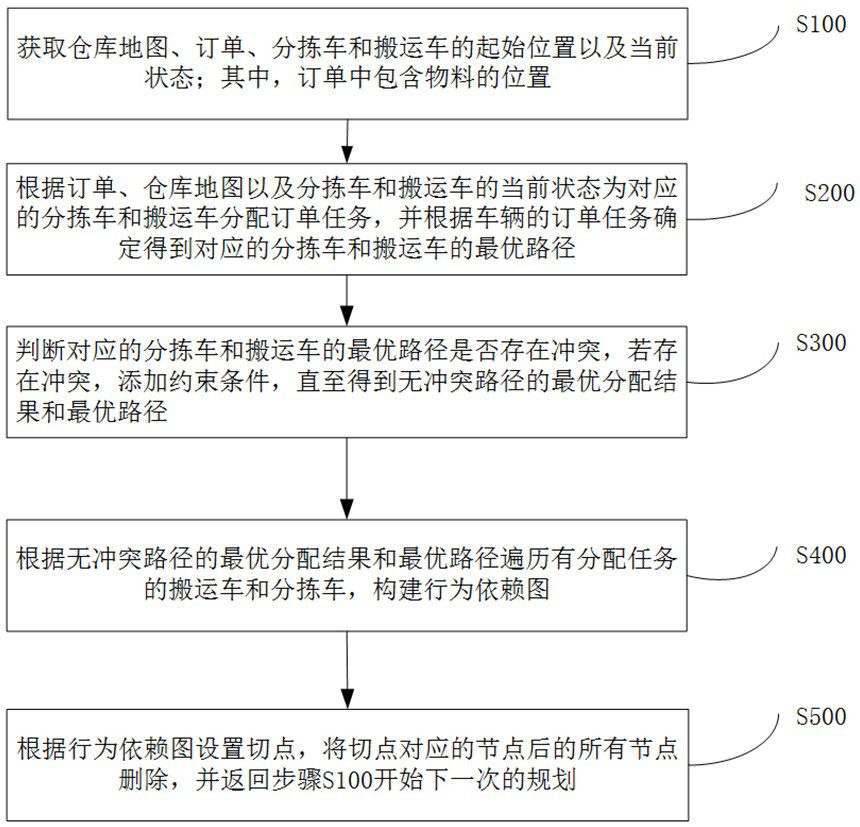
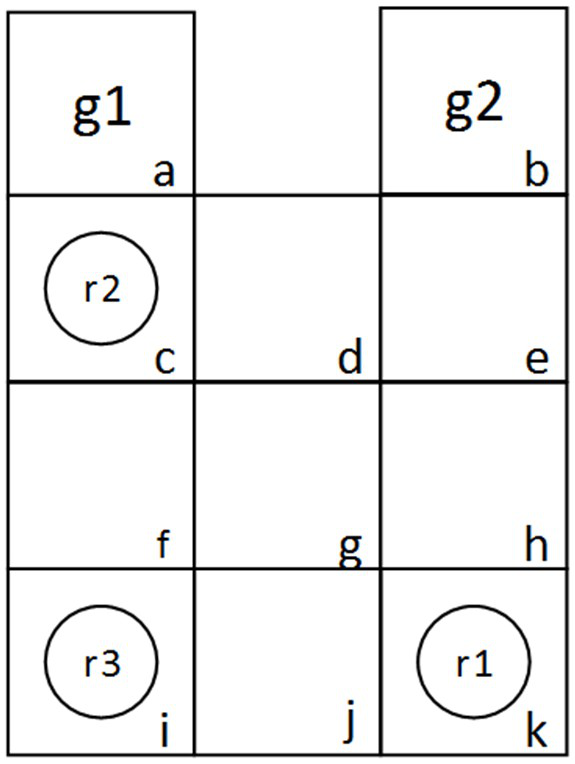
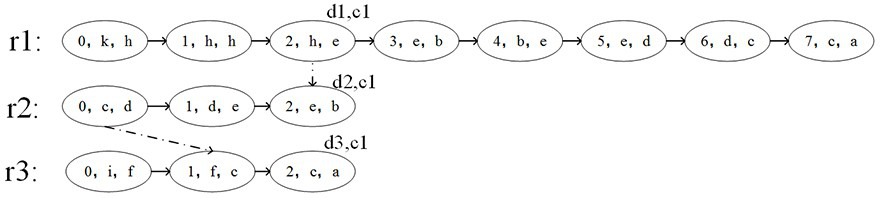
[0035] Sorting by robots requires two vehicles to work together. For example, in addition to a sorting vehicle equipped with a robotic arm and a material tray, a pallet truck is also required. The intelligent three-dimensional warehouse multi-vehicle coordinated sorting and scheduling system The entire sorting process includes the following steps: the sorting vehicle moves from its starting point to a certain position L for sorting; the pallet truck moves from the starting point to the front of the tray where the parts are located (this position is marked as P), The tray is removed from the vertical warehouse, and then moved to the sorting position L (if P=L, there is no need to move); at L, the robotic arm on the sorting vehicle picks up the parts on th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More