Automatic driving vehicle trajectory planning control implementation method
A planning control and vehicle trajectory technology, which is applied in the field of automatic driving vehicle trajectory planning and control implementation, and can solve the problems of high hardware equipment requirements, calculation time delay, and the lack of generality of path planning methods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] The present invention will be further described in detail below in conjunction with the accompanying drawings.
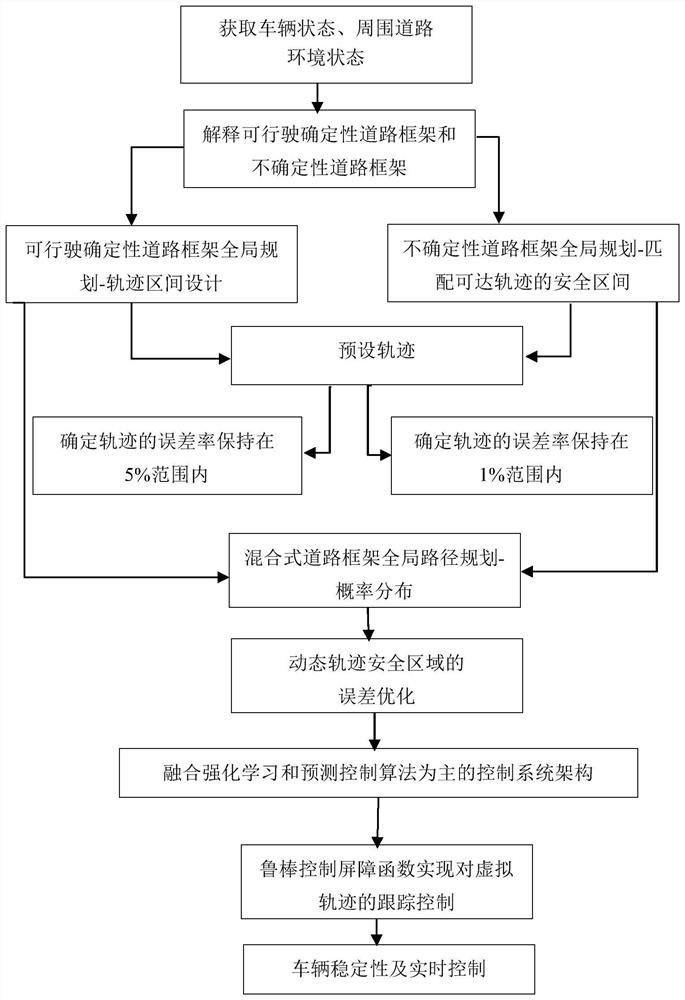
[0078] like figure 1 As shown, the present invention proposes a method for implementing trajectory planning control of an autonomous driving vehicle, which specifically includes the following steps:
[0079] Step 1: Obtain the driving status of the own vehicle, surrounding vehicles, and surrounding road environment status.
[0080] The driving states of the own vehicle and surrounding vehicles generally refer to the longitudinal and lateral speeds, accelerations, and longitudinal and lateral trajectories of the vehicles. For example, the vehicle can drive at different speeds in different road scenarios. When encountering bad weather, water and snow on the road, the vehicle needs to slow down. When there are no obstacles ahead, the vehicle needs to speed up. When the road structure changes, the vehicle needs to speed up. Need to re-route planning and adjust th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More