

Lower limb prosthesis coordination control method and system based on non-zero sum game
A technology of coordinated control and prosthetics, applied in reasoning methods, prosthetics, medical science, etc., can solve problems such as aggravating the cognitive burden of patients, achieve the effect of improving the wearing experience and avoiding data coupling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0074] like Figure 4 , the present invention provides a non-zero-sum game-based human-lower limb prosthetic coordination control method, comprising the following steps:
[0075] Step S1: Based on a series of gait data collected in multiple groups of normal walking experiments, design a set of hip, knee, and ankle joint angle trajectories that are most in line with normal gait, and obtain the desired hip joint trajectory of the lower limb on the residual limb side, and the lower limb. Preset desired trajectories of the knee and ankle joints of the prosthetic robot;
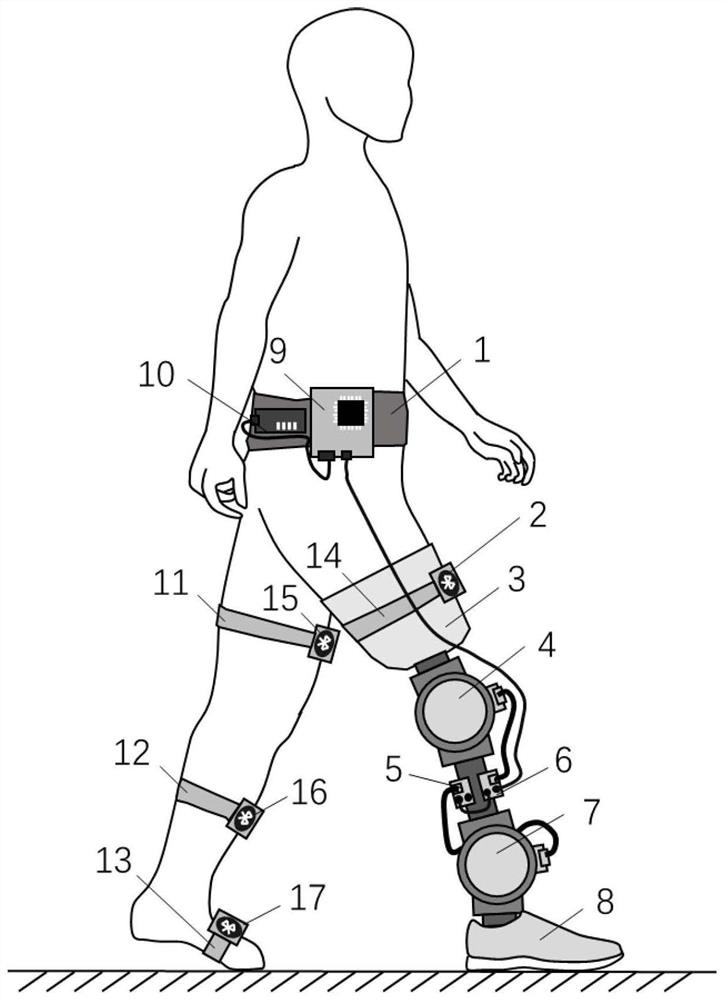
[0076] Step S2: When the unilateral amputee walks wearing the lower limb prosthesis, the IMU sensor is used to record the hip joint angle of the amputee, the joint angles of the unaffected leg knee and ankle joints in real time, and obtain the unaffected leg knee and ankle through forward kinematics calculation. The trajectory of the joint in the Cartesian space, the trajectory of the half gait cycle of the lag t...
Embodiment 2
[0112] Embodiment 2 is a preferred example of Embodiment 1.
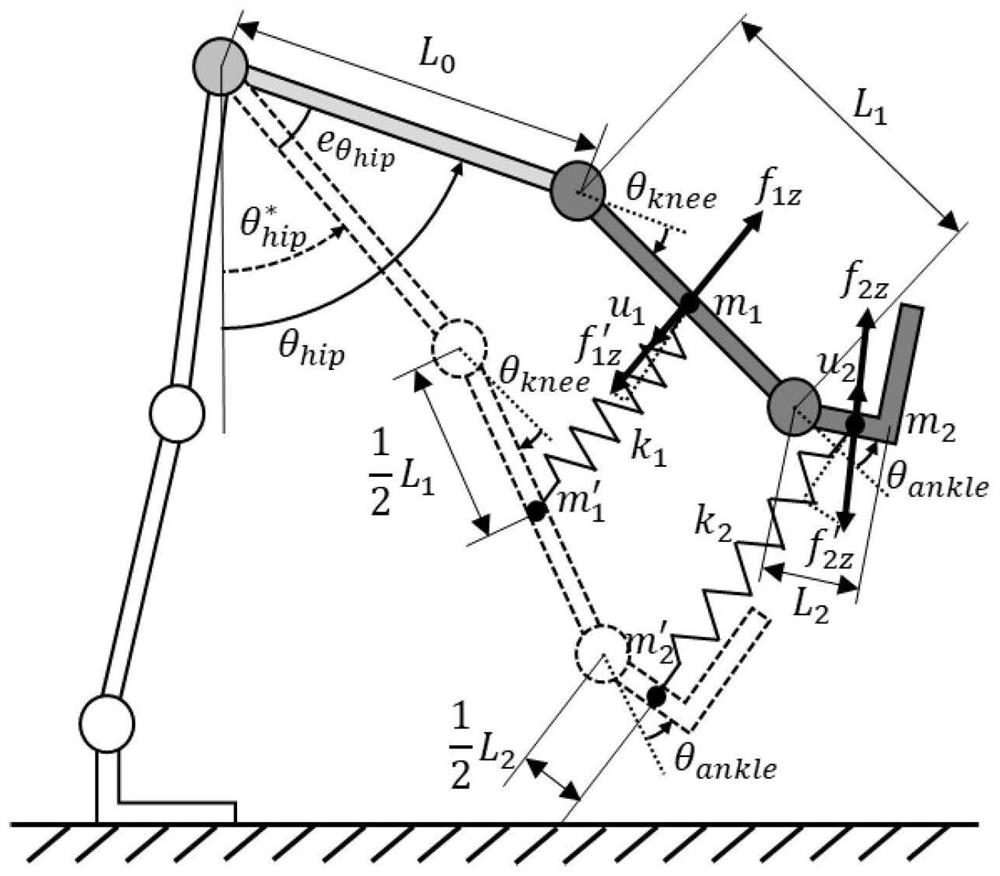
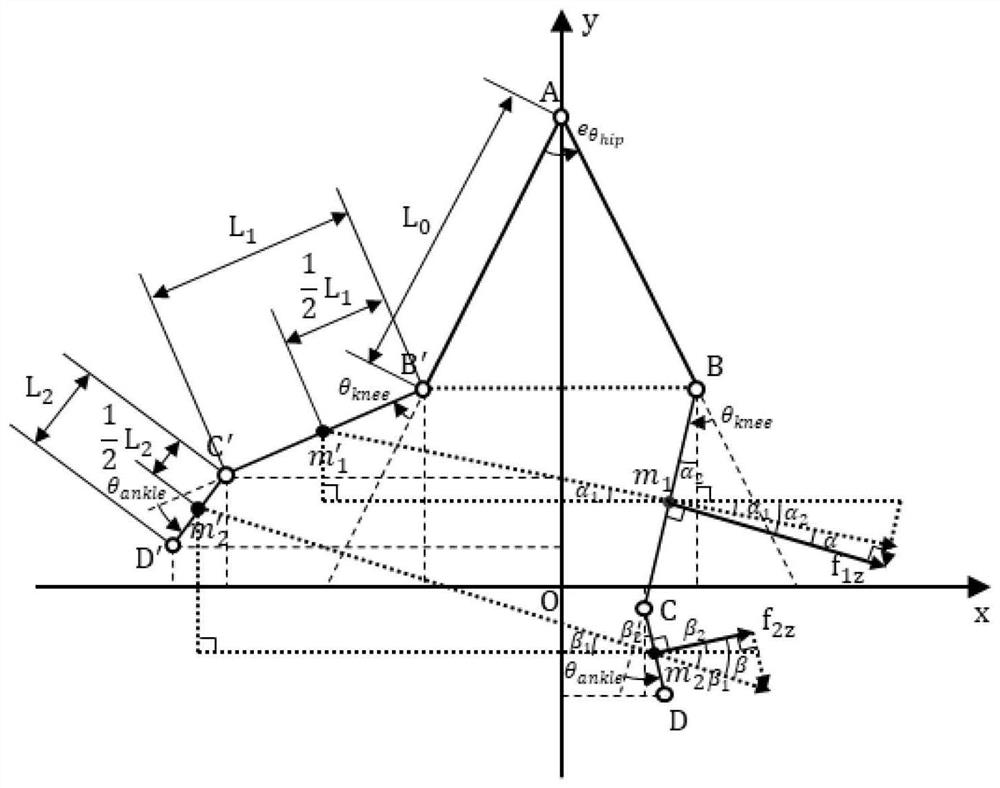
[0113] Since the actual angle of the hip joint is offset from the expected angle, when the angles of the knee and ankle joints remain unchanged, the position of the center of gravity of the calf and foot will be offset by a certain distance with the change of the hip joint angle, respectively. There is a spring between the original center of gravity and the current center of gravity of the two. When the current center of gravity does not coincide with the original center of gravity, it will receive the elastic force of the corresponding spring, and the total interaction force of the human on the calf and foot is regarded as The force that deforms the spring, while the virtual human-computer interaction force f v It is designed to be the component force of equal and opposite direction of the spring force in the direction perpendicular to the calf leg bar and perpendicular to the line connecting the ankle joint to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More