

Spatial registration method and device for three-dimensional volume data
A spatial registration and three-dimensional body technology, applied in image data processing, character and pattern recognition, image analysis, etc., can solve the problems of no simplified point set, long matching process, slow matching speed, etc., to improve registration efficiency The effect of real-time performance, shortened registration time, and reduced size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
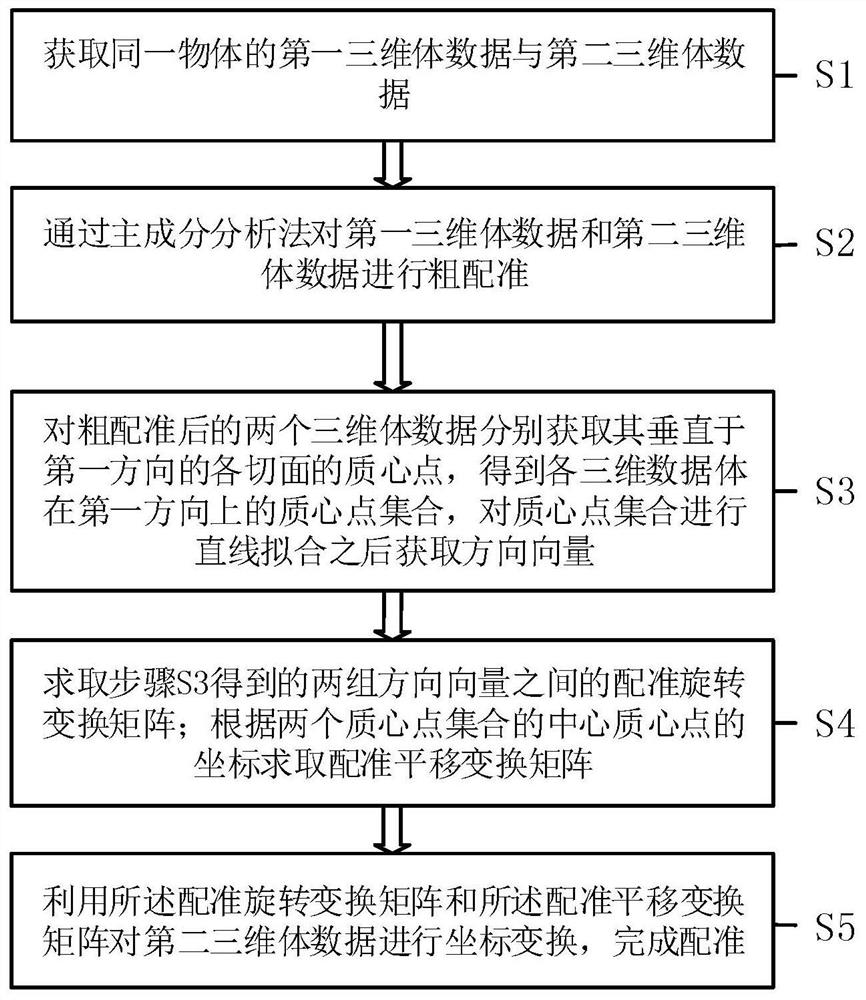
[0046] This embodiment takes the registration of carotid blood vessel data as an example, and provides a spatial registration method for three-dimensional volume data, such as figure 1 shown, including the following steps:
[0047] S1, obtaining the first three-dimensional volume data and the second three-dimensional volume data of the same object;
[0048] S2, performing rough registration on the first three-dimensional volume data and the second three-dimensional volume data by principal component analysis;
[0049] S3: Obtain the centroid points of each section perpendicular to the first direction for the two three-dimensional volume data after the rough registration, obtain the centroid point set of each three-dimensional volume data in the first direction, and perform straight line fitting on the centroid point set. After the combination, the direction vector is obtained;
[0050] S4, obtain the registration rotation transformation matrix between the two groups of direc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More