

Three-degree-of-freedom mechanical arm dynamic model with constraint
A dynamic model and manipulator technology, applied in the field of three-degree-of-freedom manipulator dynamic model, can solve the problems of reducing applicability and not considering the rationality of trajectory, etc., and achieve the effect of strong robustness and adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
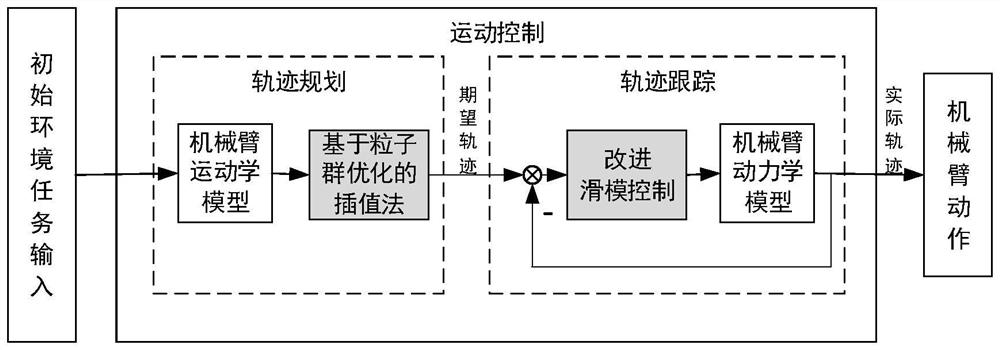
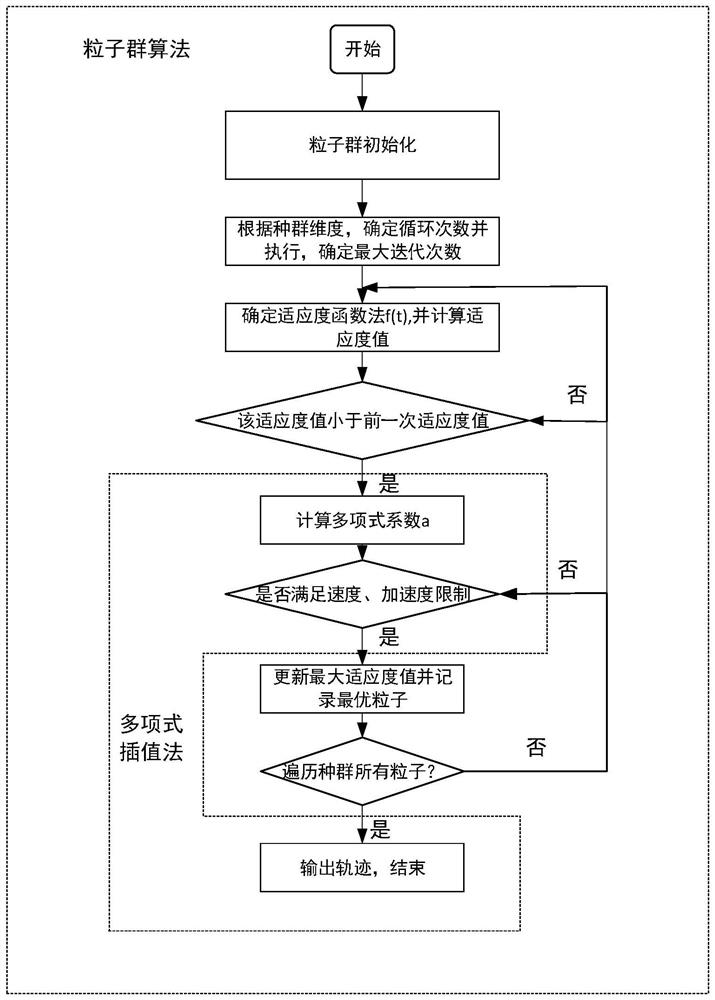
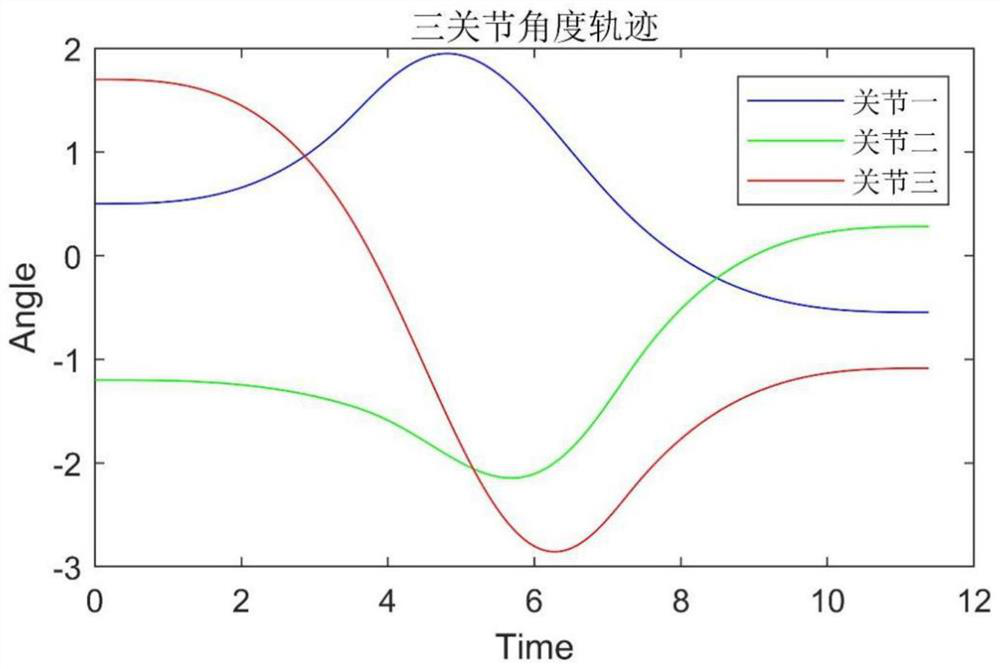
[0045] see Figure 1 to Figure 7As shown in the figure, the present invention relates to a constrained three-degree-of-freedom manipulator dynamic model. The Euler-Lagrange method is used to establish the manipulator dynamic model, and its state space expression form is given. Based on the particle swarm algorithm The motion planning of the dynamic model of the mechanical arm is calculated, and the dynamic equation of the dynamic model of the mechanical arm is:
[0046]
[0047] Among them: q=[q 1 ,q 2 ,q 3 ] T is the angle vector of the system; τ = [τ 1 ,0,τ 3 ] T is the control torque vector; M(q)∈R 3 ×3 is the inertia matrix, with positive definiteness and symmetry; is the combined vector of Coriolis force and centrifugal force.
[0048] Then the state space form of the system model is:
[0049]
[0050] in:
[0051] f(x)=[x 4 ,x 5 ,x 6 ,f 1 ,f 2 ,f 3 ]
[0052] g(x)=[g 1(x) ,g 2(x) ,g 3(x) ] T
[0053]
[0054] x is the state vector variab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More